Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Español
Español
 Français
Français
 Italiano
Italiano
 Nederlands
Nederlands
 Polskie
Polskie
 Norsk
Norsk
Warenkorb
Ihr Warenkorb ist leer, aber das muss nicht so bleiben.
Rabatt: 0.00 EUR
Digital Skipper |1/05, 2024
Diese FAQ ist Teil unserer neuen Serie zur Fehlerbehebung von SONAR-Systemen. Hier finden Sie detaillierte Anleitungen zur Untersuchung und Lösung häufiger Probleme mit SONAR, einschließlich Störungen und Einstellungen. Unabhängig davon, ob Sie ein RV-, RVM- oder AIRMAR CHIRP SONAR-System verwenden, bieten wir Schritt-für-Schritt-Anweisungen, um eine optimale Leistung zu gewährleisten. Benötigen Sie Hilfe bei der Installation oder Prüfung? Dann sind Sie hier richtig.
TEIL 1 – SONAR FEHLER: Kein Geber angeschlossen
TEIL 2 – Einführung in SONAR-Störungen
TEIL 3 – SONAR-Störungsuntersuchung – Manuelle Einstellung
TEIL 4 – SONAR Einstellung & Test: Wenn SONAR nicht von Störungen betroffen ist
TEIL 5 – SONAR Einstellung & Test: Wenn SONAR von Störungen betroffen ist
TEIL 6 – RV und RVM Transducer Sense Resistor Test
Abgesehen von Einzelfällen, in denen SONAR nicht wie vorgesehen funktioniert, z. B. bei der Wiedererfassung von Grundsperren (oft softwarebedingt), leisten unsere Hardware und Signalverarbeitung sehr gute Arbeit und liefern klare Rückmeldungen.

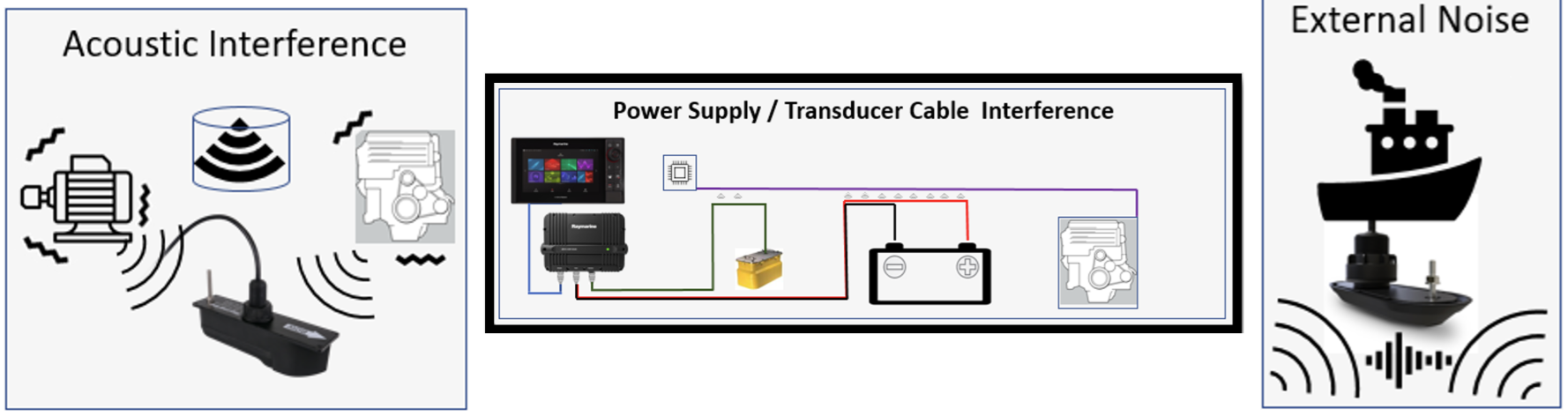
Eventuelle Leistungsprobleme mit SONAR sind meist auf externe Faktoren zurückzuführen, nicht auf das Echolot oder den Transducer. Häufige Ursachen sind:
Es spielt keine Rolle, wie gut das Bodensignal ist – das Signal-Rausch-Verhältnis ist entscheidend. Unten sehen Sie ein Beispiel, bei dem eine hohe Signalrückgabe durch hohes Rauschen im Automatikmodus maskiert wird, was zu einem schwachen Bodenbild und keinen Fischzielen führt.
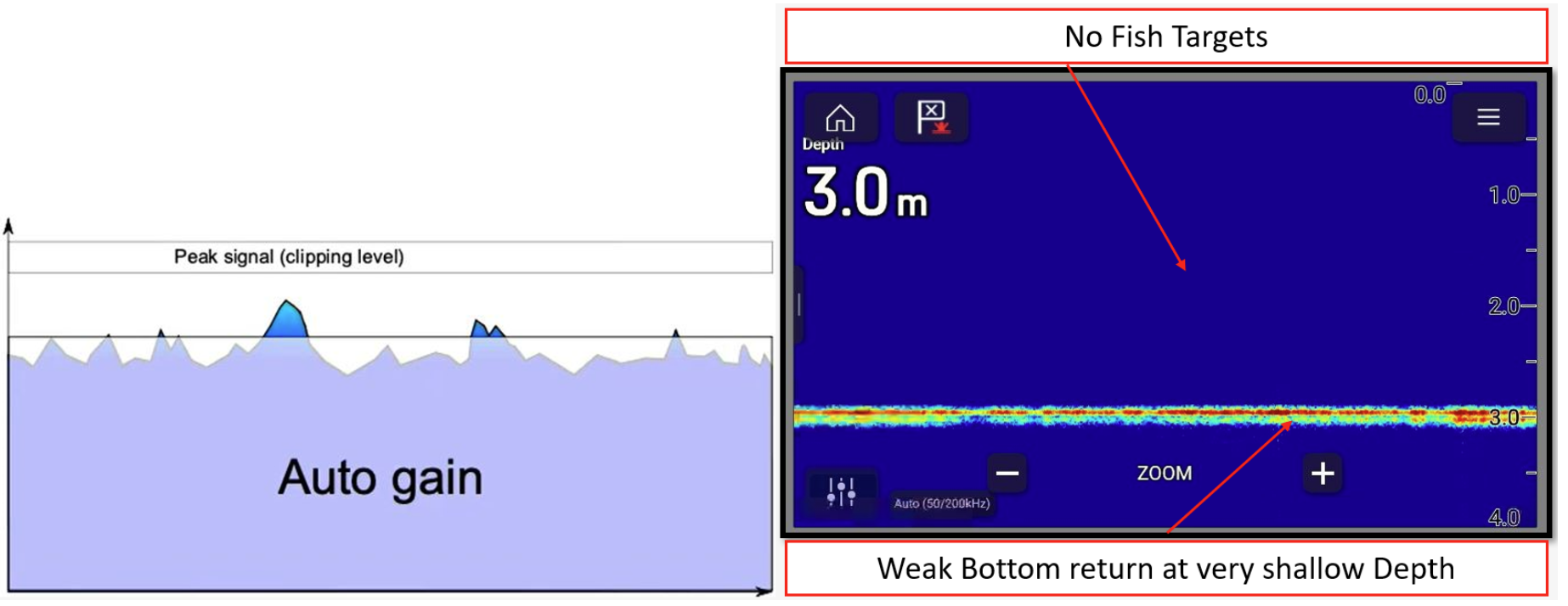
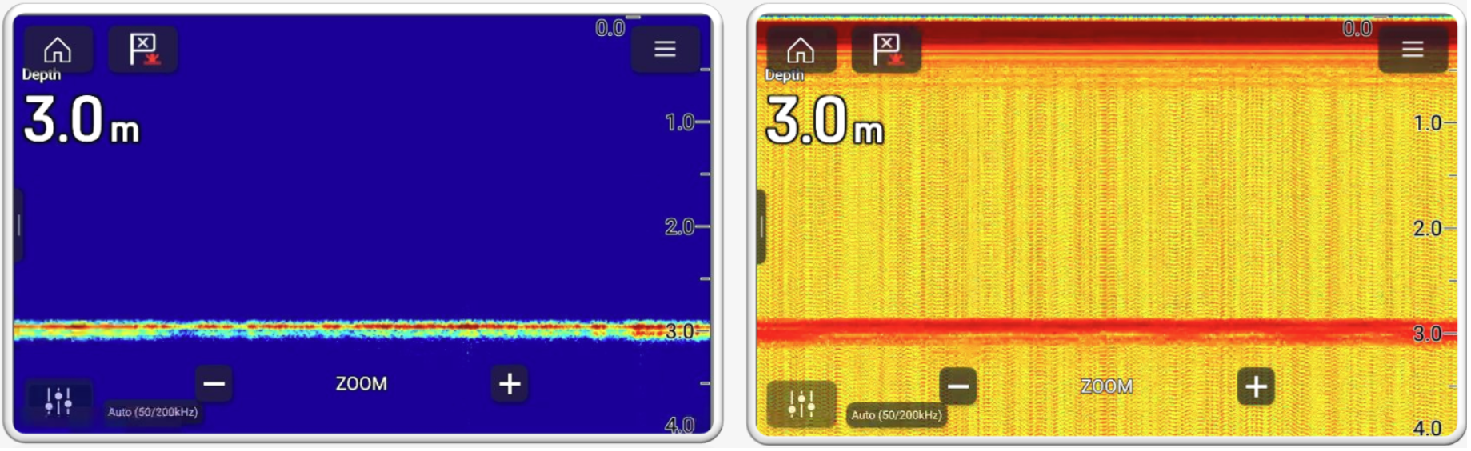
Die automatische Empfindlichkeit funktioniert in den meisten Fällen gut, kann aber Störungen verdecken. Vergleichen Sie die Bilder unten: Links zeigt den AUTO-Modus ohne Rauschen, rechts den manuellen Modus, in dem das Hintergrundrauschen sichtbar ist.
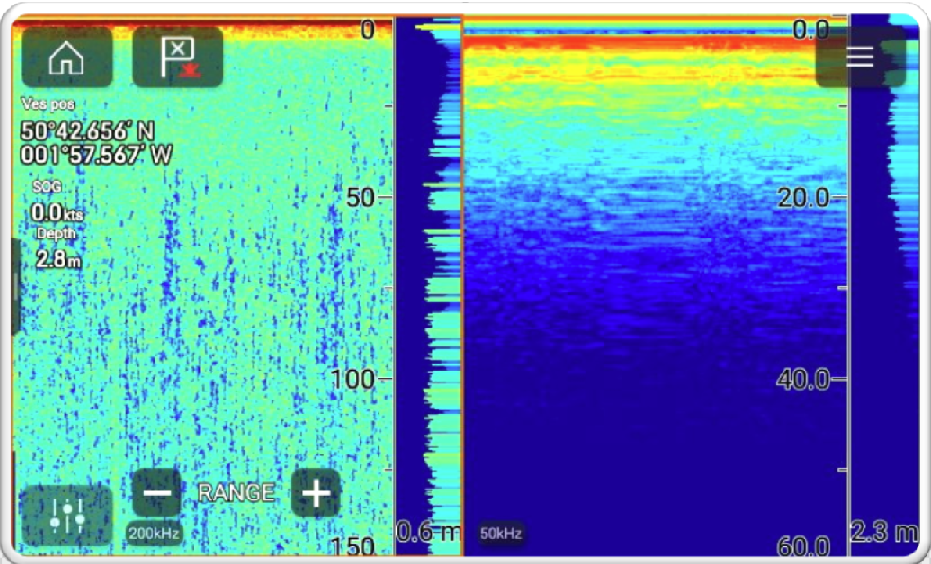
Durch die manuelle Einstellung der Reichweite können Sie Störungen identifizieren. Wenn die Tiefe 10 m beträgt, sollten Sie keine Rückmeldungen bei 100 m sehen – alles, was dort angezeigt wird, sind Störungen. Beispiel: Bei einem CP370-System betrug die Tiefe 2,8 m, aber der Bildschirm zeigte Störungen bis zu 150 m bei 200 kHz an.