Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Español
Español
 Deutsch
Deutsch
 Français
Français
 Italiano
Italiano
 Nederlands
Nederlands
 Polskie
Polskie
Handlekurv
Handlekurven din er tom, men det trenger den ikke å være..
Rabatt: 0,00 NOK
Digital Skipper |1/05, 2024
Denne FAQ-en er en del av vår nye serie for feilsøking av SONAR-systemer. Her finner du detaljerte guider for å undersøke og løse vanlige problemer med SONAR, inkludert forstyrrelser og innstillinger. Uansett om du bruker et RV-, RVM- eller AIRMAR CHIRP SONAR-system, tilbyr vi trinn-for-trinn-instruksjoner for å sikre optimal ytelse. Trenger du hjelp med installasjon eller testing? Da er dette rett sted.
DEL 1 – SONAR FEIL: Ingen giver tilkoblet
DEL 2 – Introduksjon til SONAR-forstyrrelser
DEL 3 – SONAR-forstyrrelsesundersøkelse – Manuell innstilling
DEL 4 – SONAR Innstilling & Test: Når SONAR ikke påvirkes av forstyrrelser
DEL 5 – SONAR Innstilling & Test: Når SONAR påvirkes av forstyrrelser
DEL 6 – RV og RVM Transducer Sense Resistor Test
Bortsett fra enkelte tilfeller der SONAR ikke fungerer som tiltenkt, for eksempel ved gjenanskaffelse av bunnlås (ofte programvarerelatert), presterer vår maskinvare og signalbehandling svært bra og gir tydelige returer.

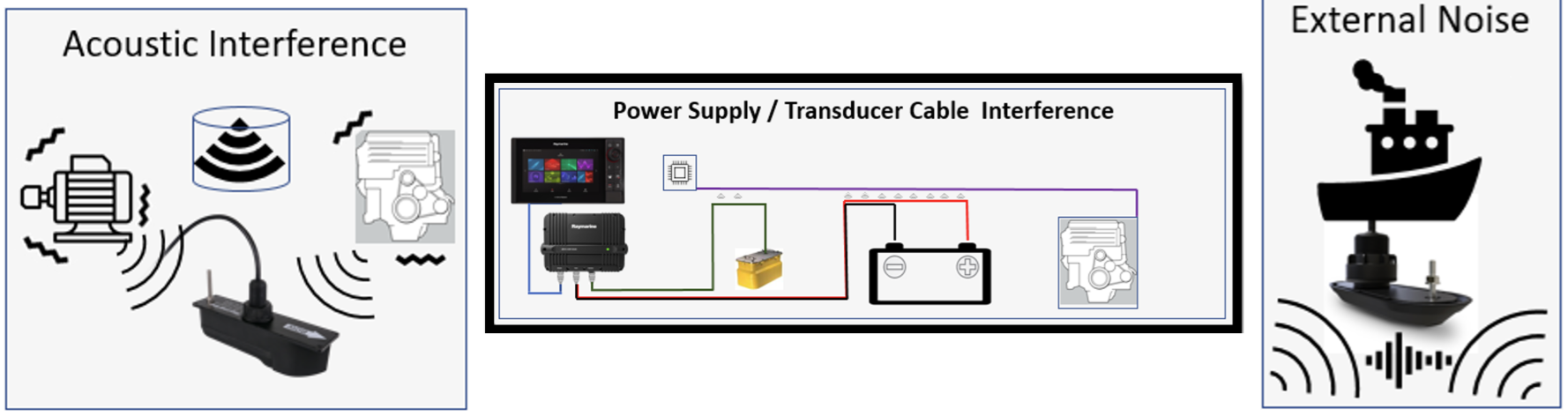
Eventuelle ytelsesproblemer med SONAR skyldes oftest eksterne faktorer, ikke ekkoloddet eller transduseren. Vanlige årsaker er:
Det spiller ingen rolle hvor bra bunnsignalet er – det er signal-til-støy-forholdet som avgjør. Nedenfor ser du et eksempel der høy signalretur maskeres av høy støy i automatisk modus, noe som gir et svakt bunnbilde og ingen fiskemål.
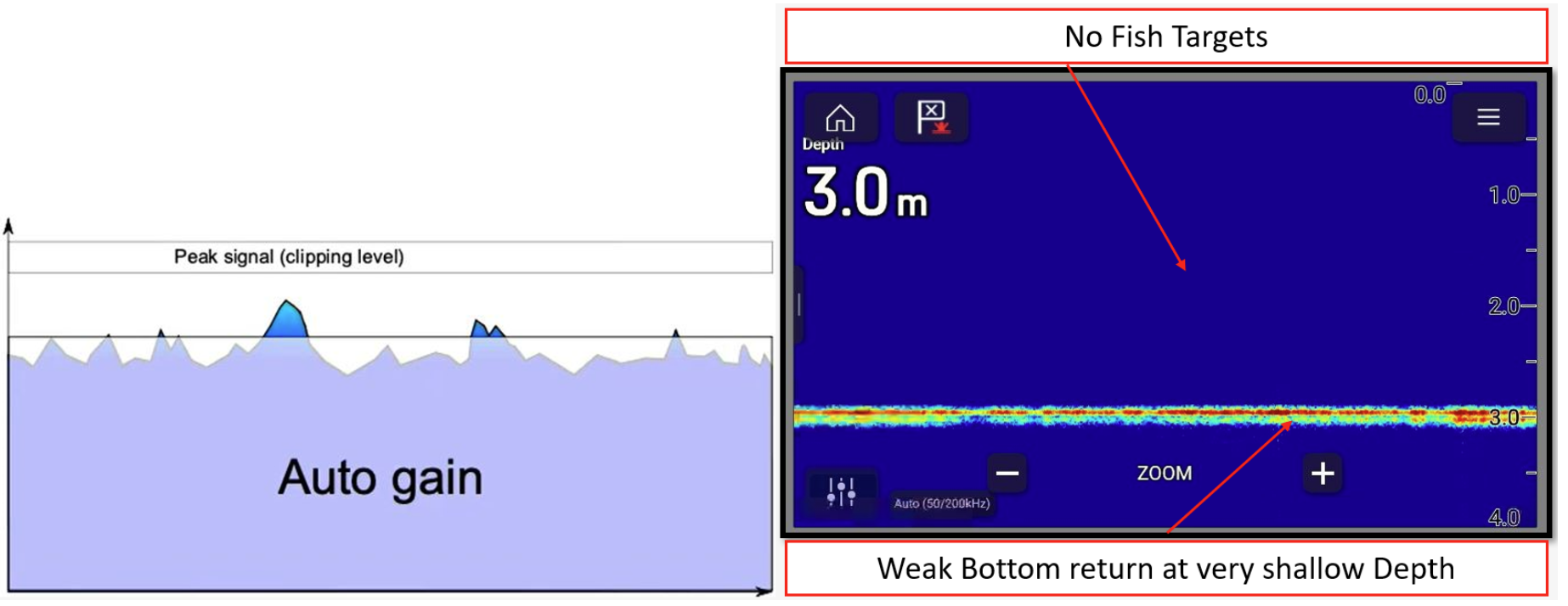
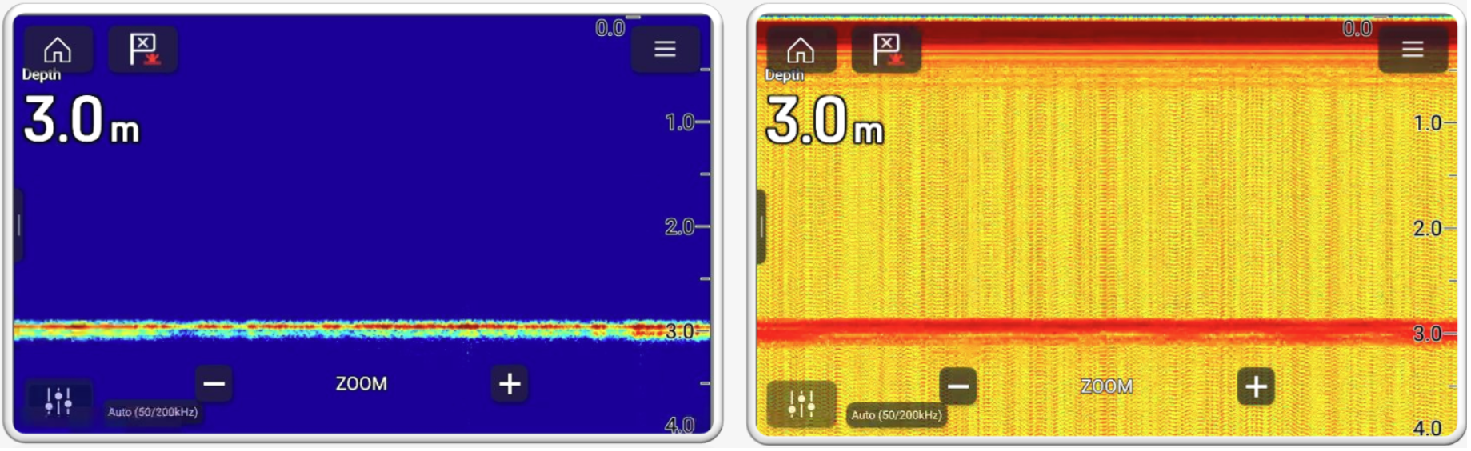
Automatisk følsomhet fungerer bra i de fleste tilfeller, men kan skjule forstyrrelser. Sammenlign bildene nedenfor: venstre viser AUTO-modus uten støy, høyre viser manuell modus der bakgrunnsstøyen er synlig.
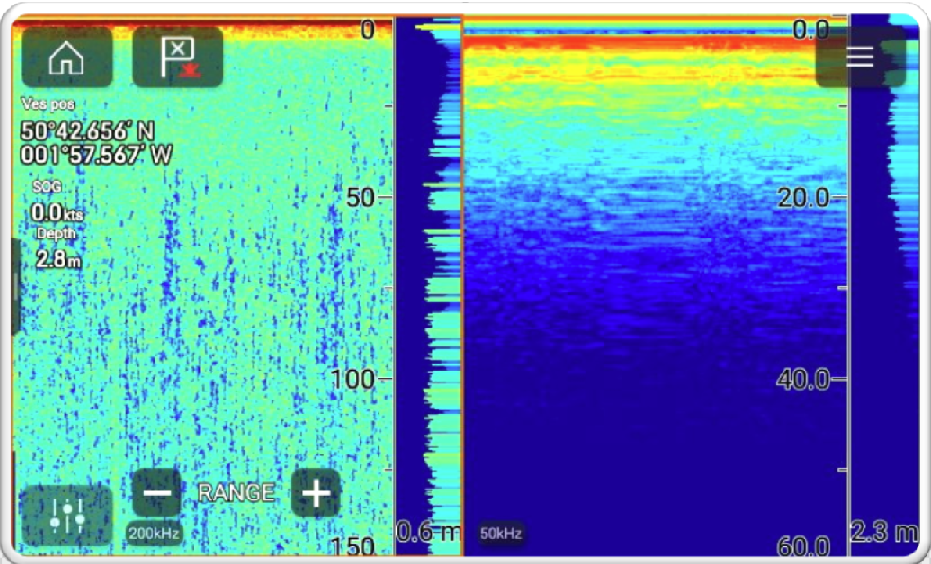
Ved å stille inn rekkevidden manuelt kan du identifisere forstyrrelser. Hvis dybden er 10 m skal du ikke se returer ved 100 m – alt som vises der er forstyrrelser. Eksempel: På et CP370-system var dybden 2,8 m men skjermen viste forstyrrelser ned til 150 m ved 200 kHz.