Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Español
Español
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 Polskie
Polskie
 Norsk
Norsk
Panier
Votre panier est vide, mais il n'a pas à l'être...
Remise: 0.00 EUR
Digital Skipper |1/05, 2024
Cette FAQ fait partie de notre nouvelle série de dépannage des systèmes SONAR. Vous trouverez ici des guides détaillés pour examiner et résoudre les problèmes courants du SONAR, y compris les interférences et les réglages. Que vous utilisiez un système SONAR RV, RVM ou AIRMAR CHIRP, nous proposons des instructions étape par étape pour garantir des performances optimales. Besoin d'aide pour l'installation ou les tests ? Alors, vous êtes au bon endroit.
PARTIE 1 – ERREUR SONAR : Aucun transducteur connecté
PARTIE 2 – Introduction aux interférences SONAR
PARTIE 3 – Examen des interférences SONAR – Réglage manuel
PARTIE 4 – Réglage et test SONAR : Lorsque le SONAR n'est pas affecté par les interférences
PARTIE 5 – Réglage et test SONAR : Lorsque le SONAR est affecté par les interférences
PARTIE 6 – Test de la résistance de détection du transducteur RV et RVM
À l'exception de quelques cas où le SONAR ne fonctionne pas comme prévu, par exemple lors de la réacquisition de verrous de fond (souvent liés au logiciel), notre matériel et notre traitement du signal fonctionnent très bien et fournissent des retours clairs.

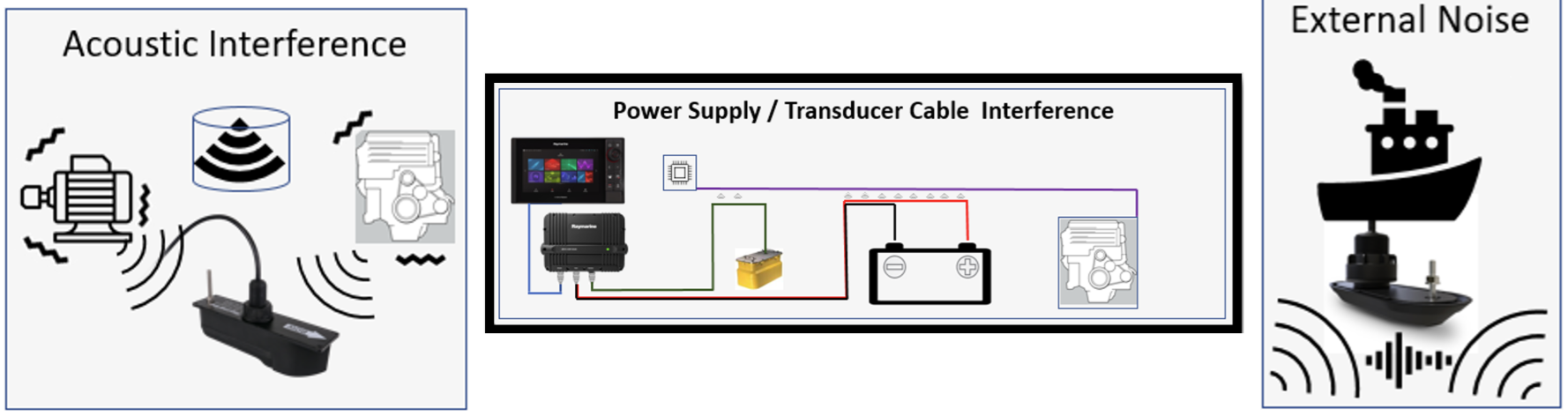
Les problèmes de performance du SONAR sont le plus souvent dus à des facteurs externes, et non à l'échosondeur ou au transducteur. Les causes courantes sont :
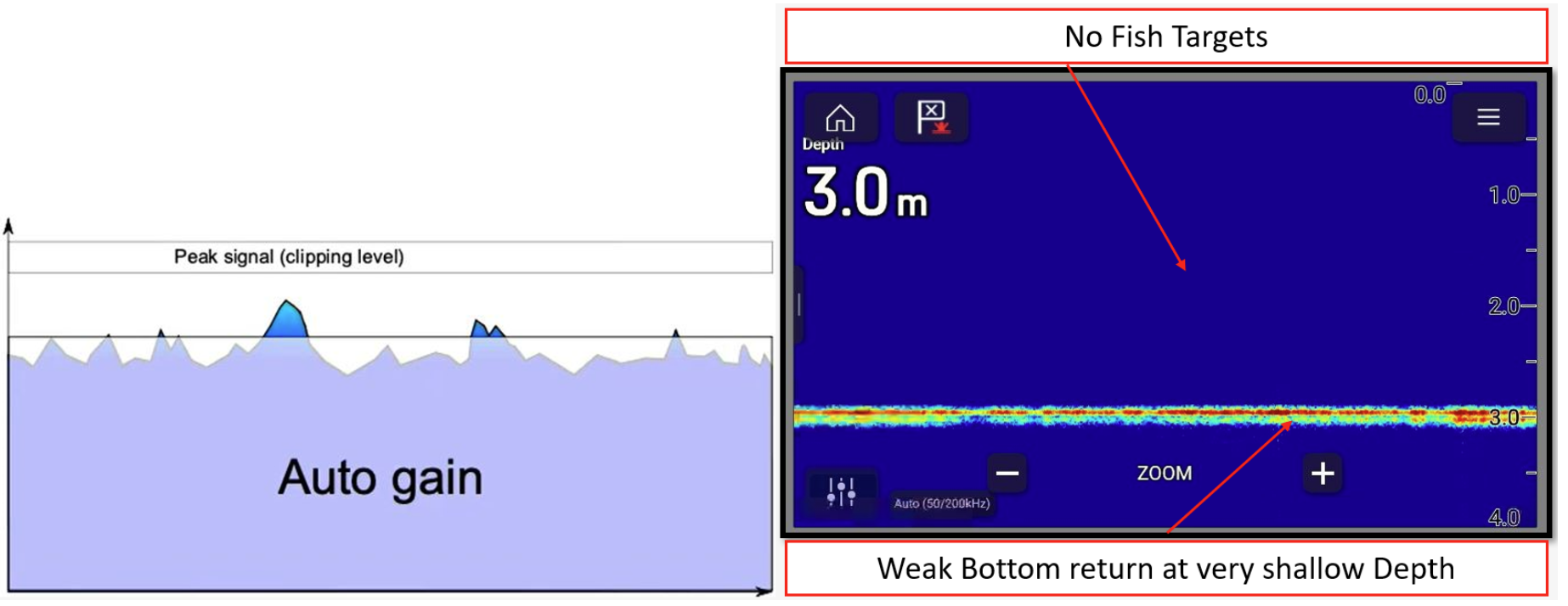
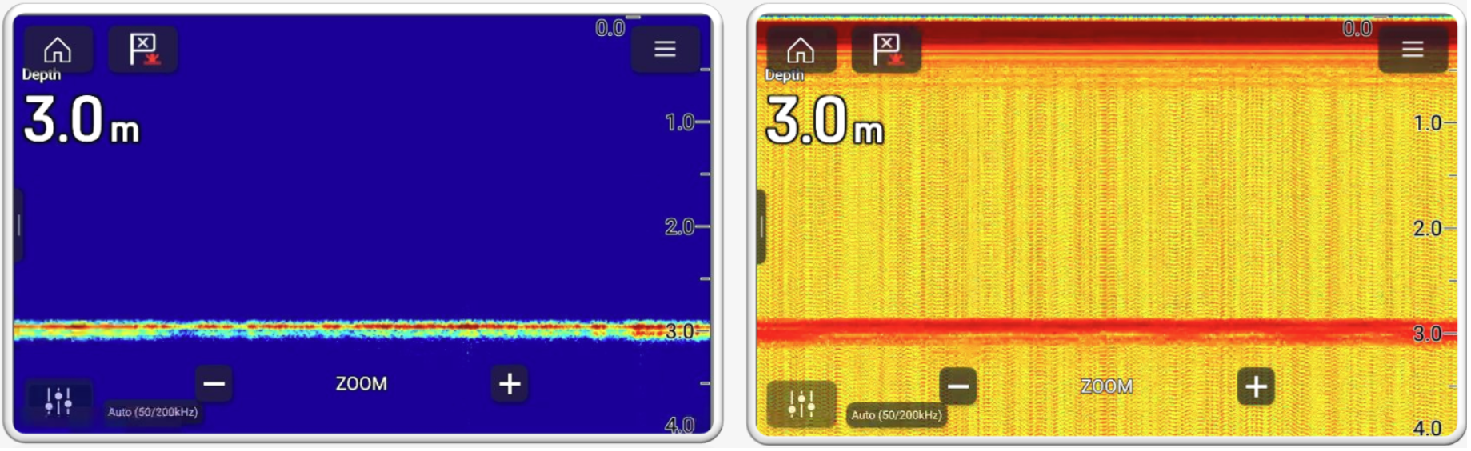
Peu importe la qualité du signal de fond – c'est le rapport signal/bruit qui est déterminant. Ci-dessous, vous voyez un exemple où un retour de signal élevé est masqué par un bruit élevé en mode automatique, ce qui donne une image de fond faible et aucune cible de poisson.
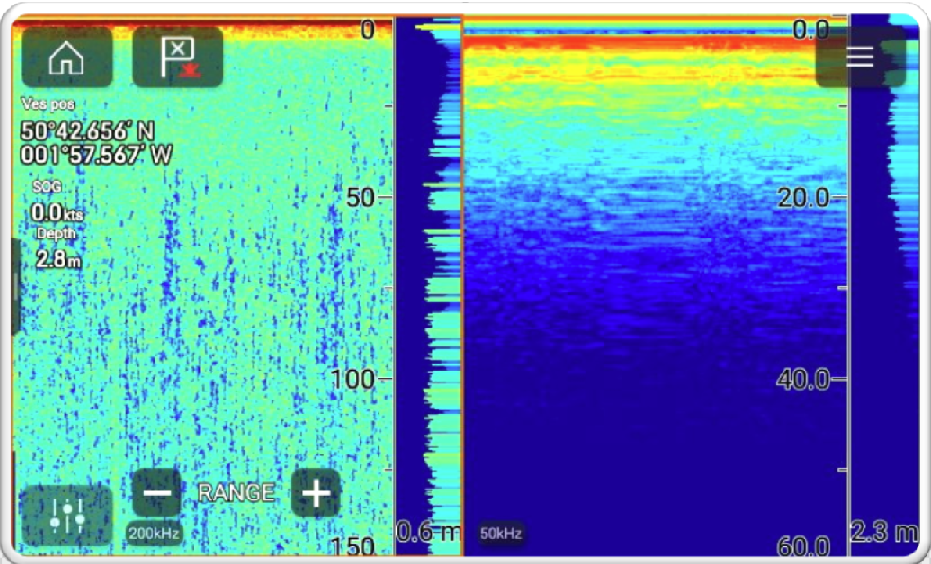
La sensibilité automatique fonctionne bien dans la plupart des cas, mais peut masquer les interférences. Comparez les images ci-dessous : à gauche, le mode AUTO sans bruit, à droite, le mode manuel où le bruit de fond est visible.
En réglant la portée manuellement, vous pouvez identifier les interférences. Si la profondeur est de 10 m, vous ne devriez pas voir de retours à 100 m – tout ce qui s'affiche là est une interférence. Exemple : Sur un système CP370, la profondeur était de 2,8 m mais l'écran affichait des interférences jusqu'à 150 m à 200 kHz.