Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Deutsch
Deutsch
 Français
Français
 Italiano
Italiano
 Nederlands
Nederlands
 Polskie
Polskie
 Norsk
Norsk
Carrito
Tu carrito está vacío, pero no tiene por qué estarlo...
Discount: 0.00 EUR
Digital Skipper |1/05, 2024
Esta FAQ forma parte de nuestra nueva serie de resolución de problemas de sistemas SONAR. Aquí encontrará guías detalladas para investigar y resolver problemas comunes con SONAR, incluyendo interferencias y configuraciones. Ya sea que utilice un sistema SONAR RV, RVM o AIRMAR CHIRP, ofrecemos instrucciones paso a paso para garantizar un rendimiento óptimo. ¿Necesita ayuda con la instalación o las pruebas? Entonces este es el lugar correcto.
PARTE 1 – ERROR DE SONAR: Transductor no conectado
PARTE 2 – Introducción a las interferencias de SONAR
PARTE 3 – Investigación de interferencias de SONAR – Configuración manual
PARTE 4 – Configuración y prueba de SONAR: Cuando el SONAR no se ve afectado por interferencias
PARTE 5 – Configuración y prueba de SONAR: Cuando el SONAR se ve afectado por interferencias
PARTE 6 – Prueba de resistencia de detección de transductor RV y RVM
Excepto en ocasiones puntuales en las que el SONAR no funciona como se espera, por ejemplo, en la readquisición de bloqueos de fondo (a menudo relacionados con el software), nuestro hardware y procesamiento de señales funcionan muy bien y proporcionan retornos claros.

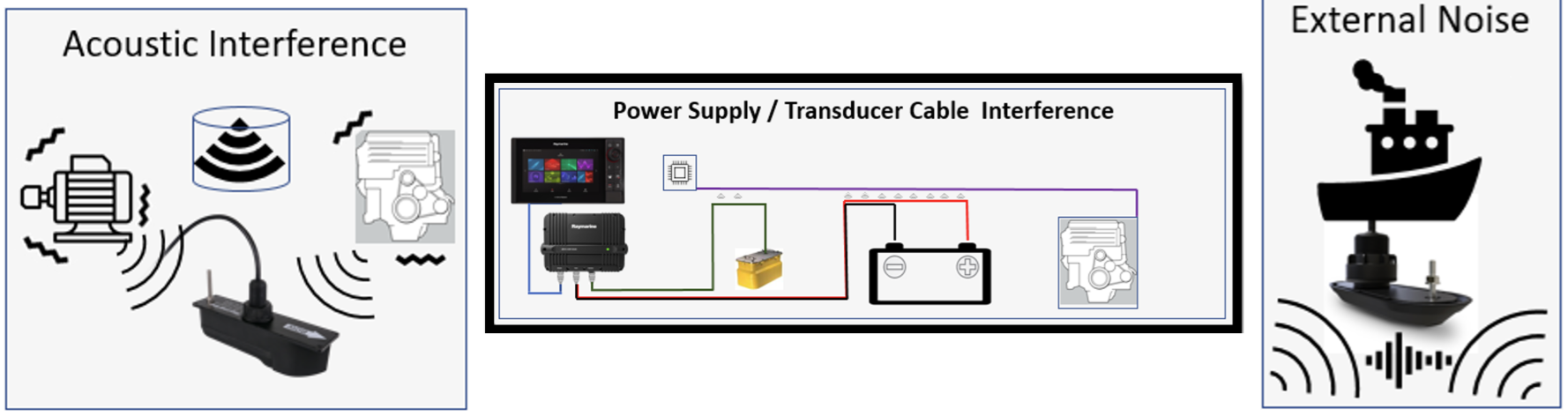
Cualquier problema de rendimiento con el SONAR se debe generalmente a factores externos, no a la ecosonda o al transductor. Las causas comunes son:
No importa lo buena que sea la señal de fondo, lo que importa es la relación señal/ruido. A continuación, se muestra un ejemplo en el que un alto retorno de señal se enmascara con un alto ruido en modo automático, lo que da como resultado una imagen de fondo débil y sin objetivos de peces.
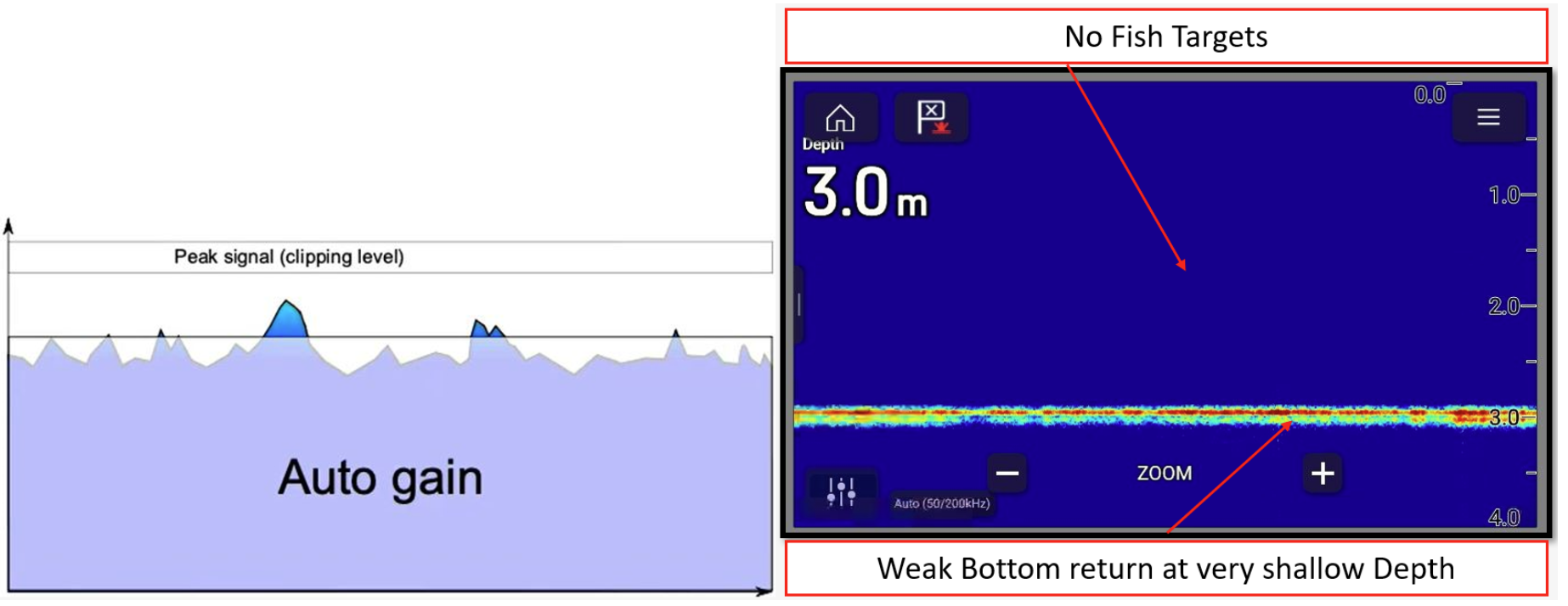
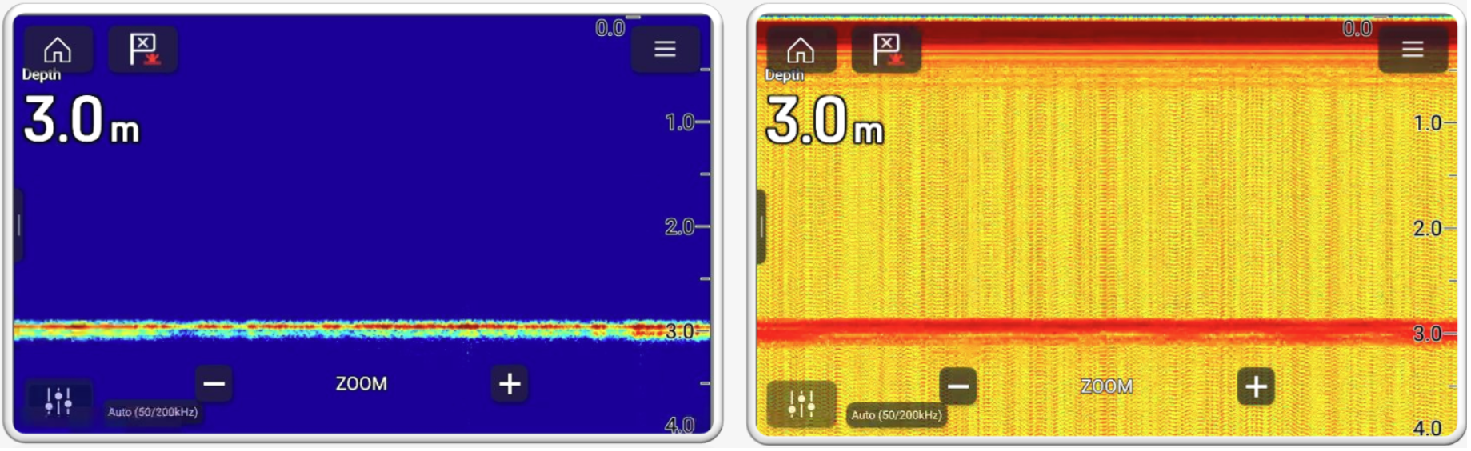
La sensibilidad automática funciona bien en la mayoría de los casos, pero puede ocultar interferencias. Compare las imágenes a continuación: la izquierda muestra el modo AUTO sin ruido, la derecha muestra el modo manual donde el ruido de fondo es visible.
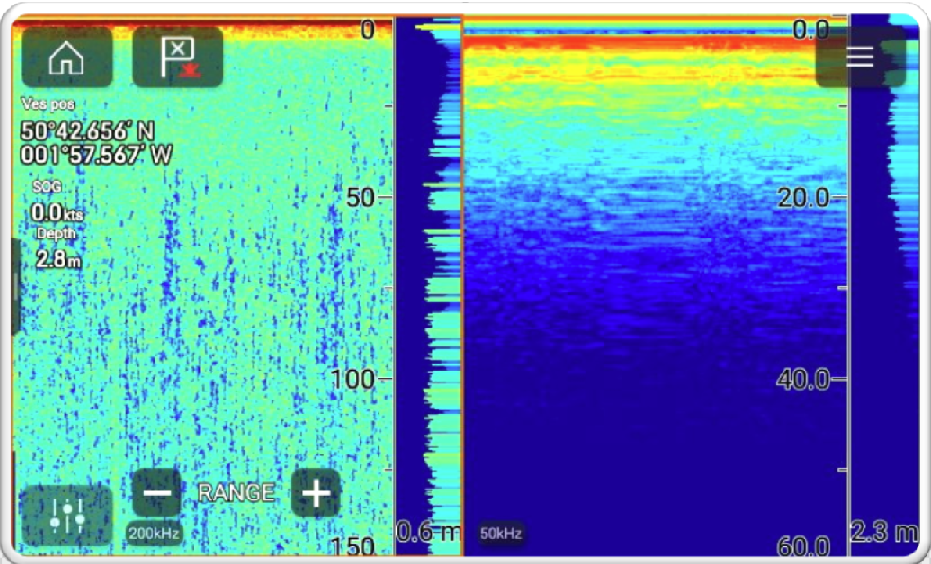
Al establecer el rango manualmente, puede identificar interferencias. Si la profundidad es de 10 m, no debería ver retornos a 100 m; todo lo que se muestra allí son interferencias. Ejemplo: En un sistema CP370, la profundidad era de 2,8 m, pero la pantalla mostraba interferencias hasta 150 m a 200 kHz.