Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Español
Español
 Deutsch
Deutsch
 Français
Français
 Italiano
Italiano
 Polskie
Polskie
 Norsk
Norsk
Winkelwagen
Je winkelwagen is leeg, maar dat hoeft niet zo te zijn..
Korting: 0.00 EUR
Digital Skipper |1/05, 2024
Deze FAQ maakt deel uit van onze nieuwe serie voor het oplossen van problemen met SONAR-systemen. Hier vindt u gedetailleerde handleidingen voor het onderzoeken en oplossen van veelvoorkomende problemen met SONAR, inclusief storingen en instellingen. Of u nu een RV-, RVM- of AIRMAR CHIRP SONAR-systeem gebruikt, wij bieden stap-voor-stap instructies om optimale prestaties te garanderen. Heeft u hulp nodig bij de installatie of het testen? Dan bent u hier aan het juiste adres.
DEEL 1 – SONAR FOUT: Geen transducer aangesloten
DEEL 2 – Introductie tot SONAR-storingen
DEEL 3 – SONAR-storingen onderzoeken – Handmatige instelling
DEEL 4 – SONAR Instelling & Test: Wanneer SONAR niet wordt beïnvloed door storingen
DEEL 5 – SONAR Instelling & Test: Wanneer SONAR wordt beïnvloed door storingen
DEEL 6 – RV en RVM Transducer Sense Resistor Test
Afgezien van incidentele gevallen waarin SONAR niet werkt zoals bedoeld, bijvoorbeeld bij het opnieuw verwerven van bodemvergrendeling (vaak softwaregerelateerd), presteren onze hardware en signaalverwerking zeer goed en leveren ze duidelijke resultaten.

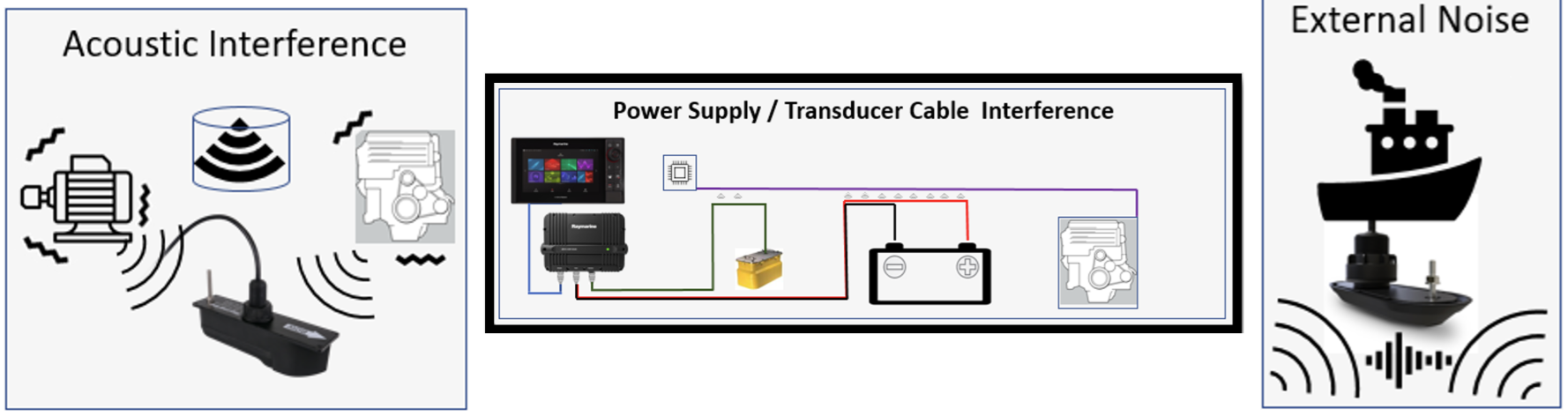
Eventuele prestatieproblemen met SONAR zijn meestal te wijten aan externe factoren, niet aan de fishfinder of transducer. Veelvoorkomende oorzaken zijn:
Het maakt niet uit hoe goed het bodemsignaal is – de signaal-ruisverhouding is bepalend. Hieronder ziet u een voorbeeld waarbij een hoge signaalterugkeer wordt gemaskeerd door hoge ruis in de automatische modus, wat resulteert in een zwak bodembeeld en geen visdoelen.
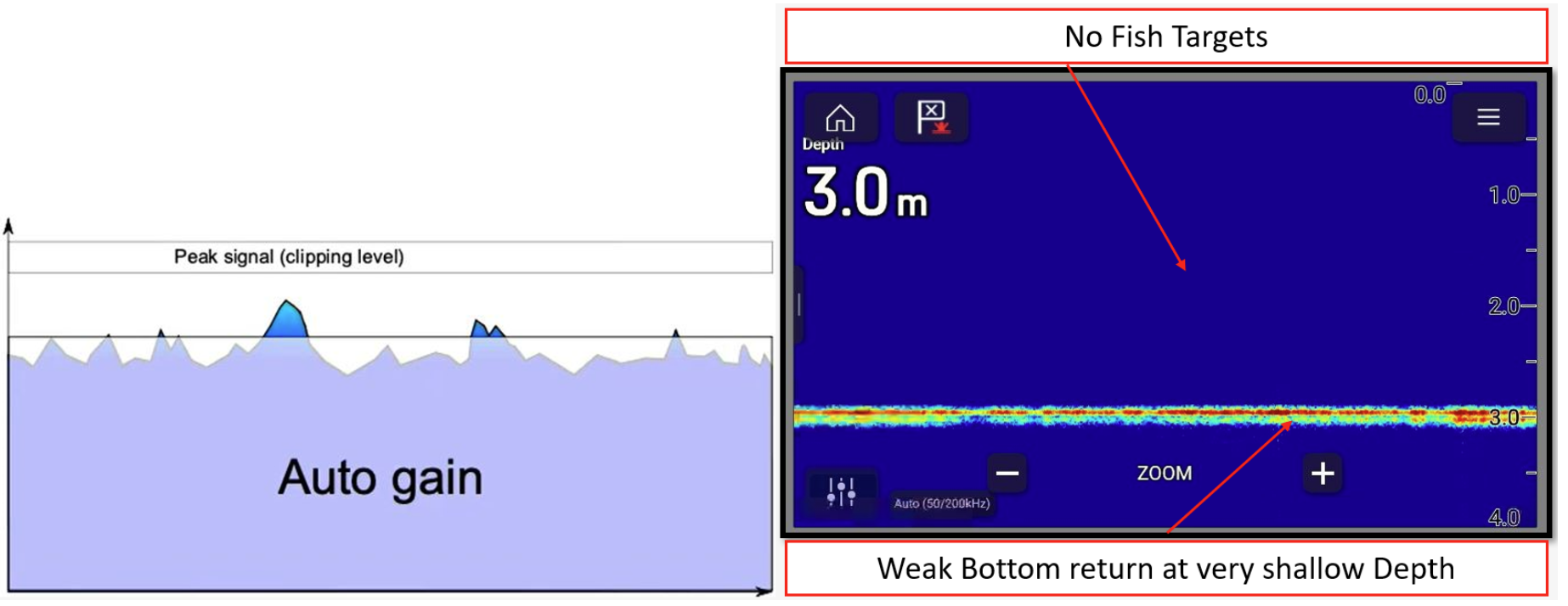
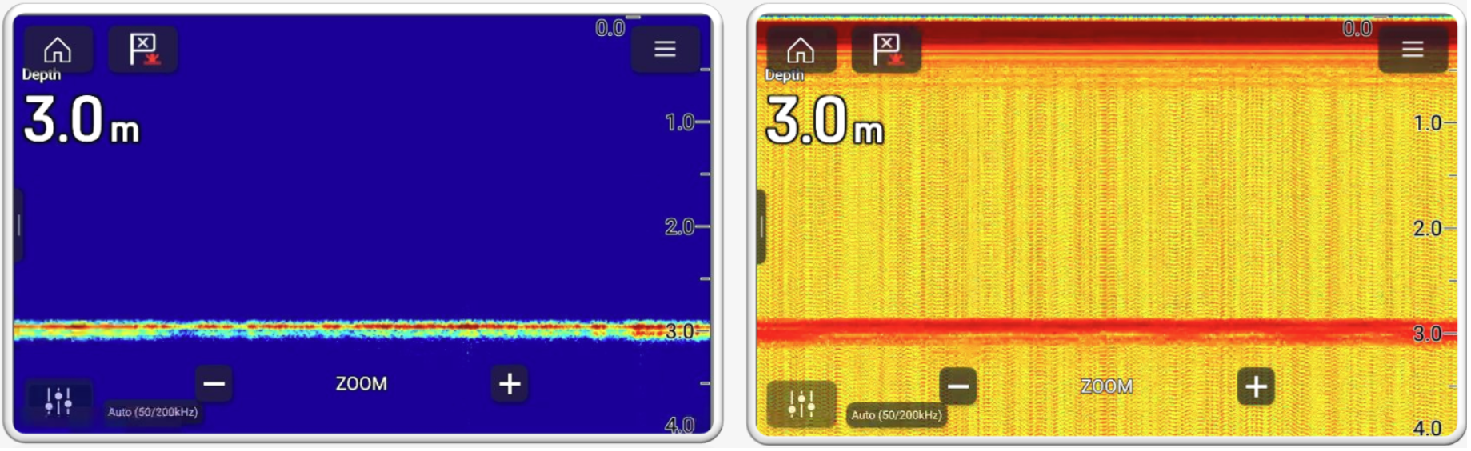
Automatische gevoeligheid werkt in de meeste gevallen goed, maar kan storingen verbergen. Vergelijk de onderstaande afbeeldingen: links toont de AUTO-modus zonder ruis, rechts toont de handmatige modus waar de achtergrondruis zichtbaar is.
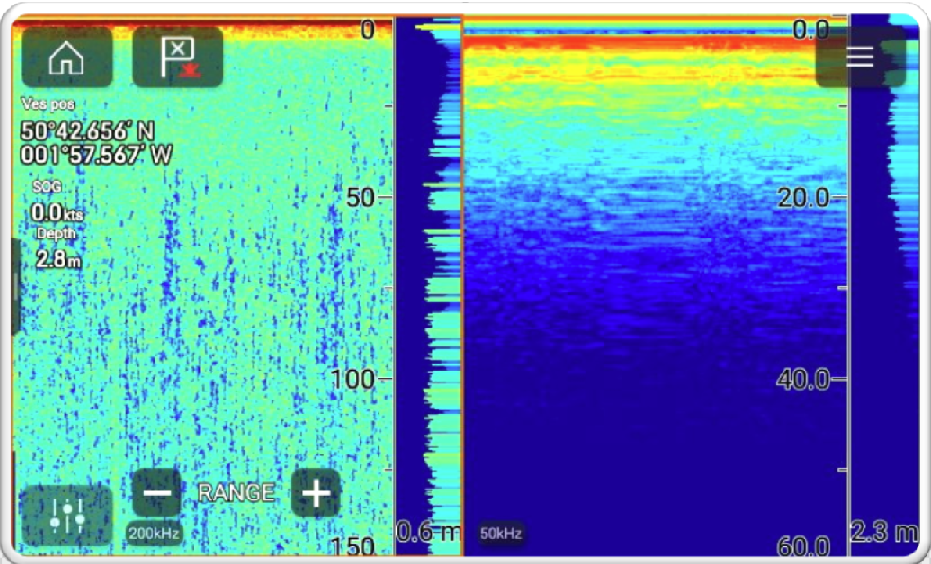
Door het bereik handmatig in te stellen, kunt u storingen identificeren. Als de diepte 10 m is, mag u geen terugkeer zien op 100 m – alles wat daar wordt weergegeven, is storing. Voorbeeld: Op een CP370-systeem was de diepte 2,8 m, maar het scherm toonde storingen tot 150 m bij 200 kHz.