Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Español
Español
 Deutsch
Deutsch
 Français
Français
 Italiano
Italiano
 Nederlands
Nederlands
 Norsk
Norsk
Koszyk
Twój koszyk jest pusty, ale nie musi taki być..
Rabat: 0.00 PLN
Digital Skipper |1/05, 2024
To FAQ jest częścią naszej nowej serii poświęconej rozwiązywaniu problemów z systemami SONAR. Znajdziesz tu szczegółowe przewodniki dotyczące badania i rozwiązywania typowych problemów z SONARem, w tym zakłóceń i ustawień. Niezależnie od tego, czy używasz systemu SONAR RV, RVM, czy AIRMAR CHIRP, oferujemy instrukcje krok po kroku, aby zapewnić optymalną wydajność. Potrzebujesz pomocy z instalacją lub testowaniem? To jest właściwe miejsce.
CZĘŚĆ 1 – BŁĄD SONAR: Brak podłączonego przetwornika
CZĘŚĆ 2 – Wprowadzenie do zakłóceń SONAR
CZĘŚĆ 3 – Badanie zakłóceń SONAR – Ustawienia ręczne
CZĘŚĆ 4 – Ustawienia i test SONAR: Gdy SONAR nie jest dotknięty zakłóceniami
CZĘŚĆ 5 – Ustawienia i test SONAR: Gdy SONAR jest dotknięty zakłóceniami
CZĘŚĆ 6 – Test rezystora czujnika przetwornika RV i RVM
Poza sporadycznymi przypadkami, gdy SONAR nie działa zgodnie z przeznaczeniem, na przykład przy ponownym uzyskiwaniu blokady dna (często związane z oprogramowaniem), nasz sprzęt i przetwarzanie sygnału działają bardzo dobrze i zapewniają wyraźne obrazy.

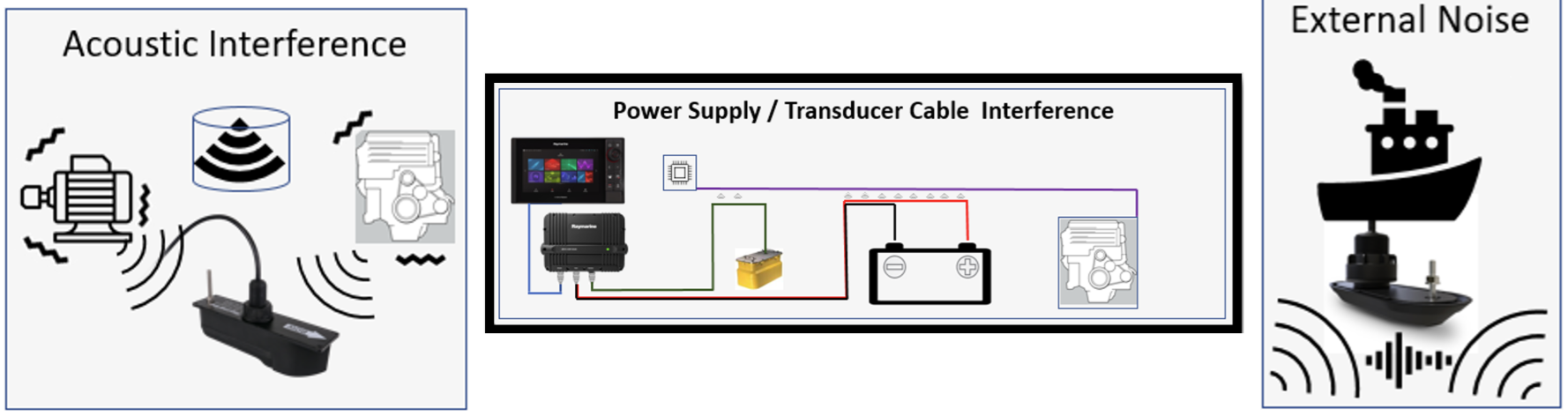
Wszelkie problemy z wydajnością SONAR najczęściej wynikają z czynników zewnętrznych, a nie z echosondy czy przetwornika. Typowe przyczyny to:
Nie ma znaczenia, jak dobry jest sygnał dna – decydujący jest stosunek sygnału do szumu. Poniżej przykład, gdzie wysoki sygnał powrotny jest maskowany przez wysoki szum w trybie automatycznym, co daje słaby obraz dna i brak celów rybnych.
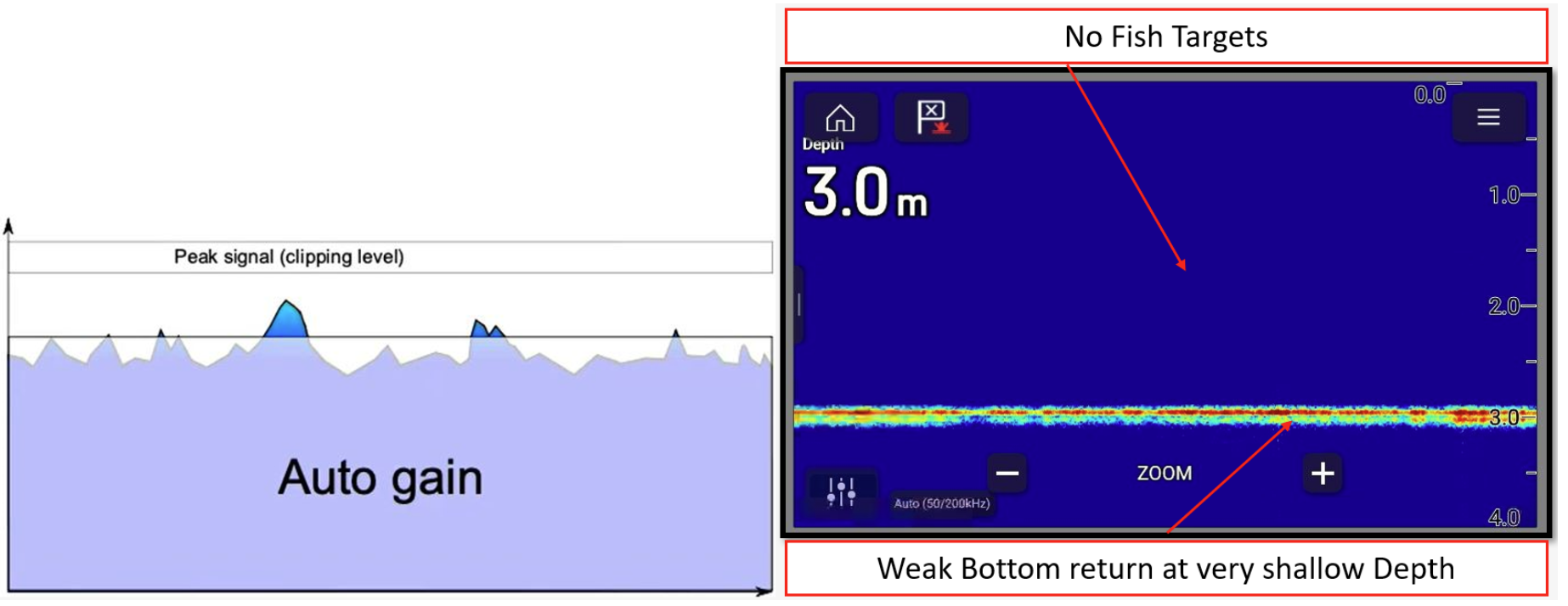
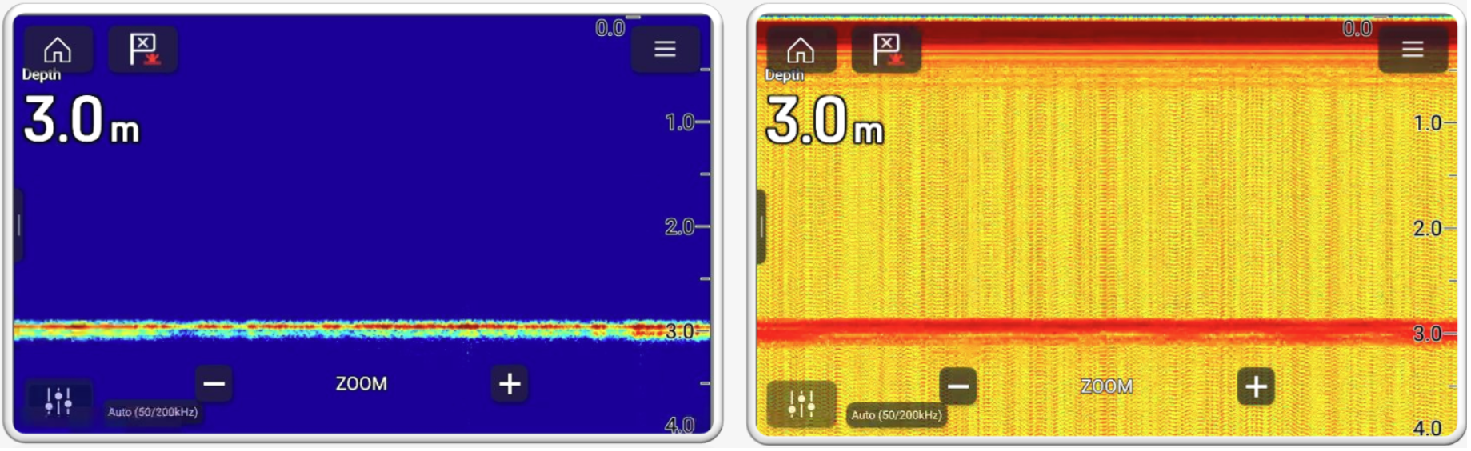
Automatyczna czułość działa dobrze w większości przypadków, ale może ukrywać zakłócenia. Porównaj poniższe obrazy: lewy pokazuje tryb AUTO bez szumu, prawy pokazuje tryb ręczny, gdzie widoczny jest szum tła.
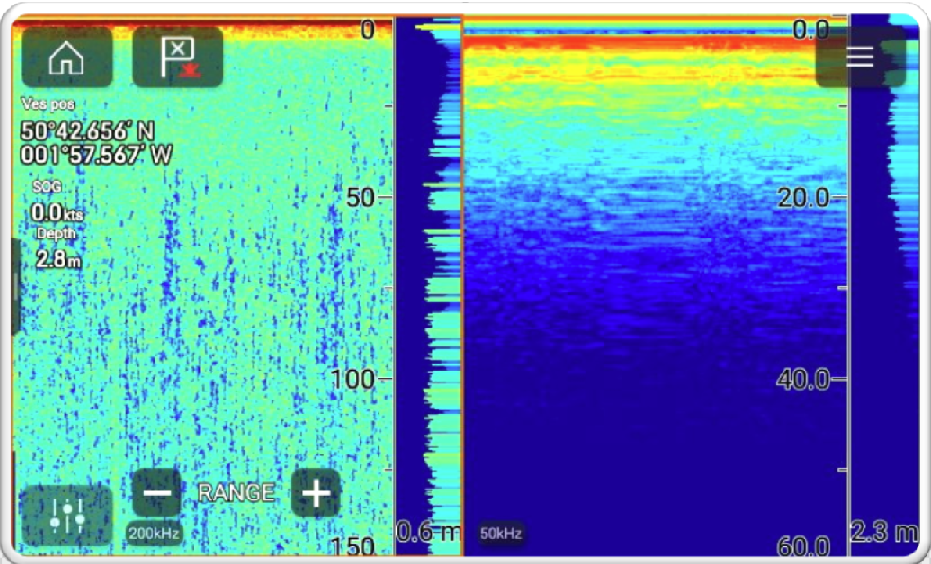
Ustawiając zasięg ręcznie, możesz zidentyfikować zakłócenia. Jeśli głębokość wynosi 10 m, nie powinieneś widzieć powrotów na 100 m – wszystko, co tam się pojawia, to zakłócenia. Przykład: W systemie CP370 głębokość wynosiła 2,8 m, ale ekran pokazywał zakłócenia do 150 m przy 200 kHz.