
 Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Español
Español
 Français
Français
 Italiano
Italiano
 Nederlands
Nederlands
 Polskie
Polskie
 Norsk
Norsk
Warenkorb
Ihr Warenkorb ist leer, aber das muss nicht so bleiben.
Rabatt: 0.00 GBP
Digital Skipper |2/09, 2024
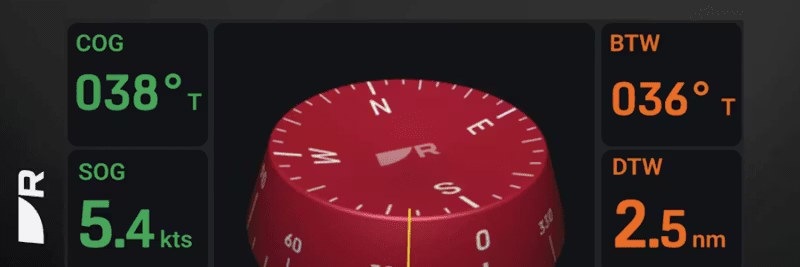
Der Kurs ist der Winkel, der die Ausrichtung des Schiffes relativ zum wahren oder magnetischen Norden angibt – kurz gesagt, die Richtung, in die das Schiff zeigt. Dies setzt voraus, dass der magnetische Kursgeber korrekt kalibriert und eingestellt ist.
Der Kurs über Grund (COG) ist der Winkel, der die tatsächliche Richtung angibt, in die sich das Schiff über die Erdoberfläche relativ zum Norden bewegt. Damit COG gültig ist, muss sich das Schiff in Bewegung befinden. Im Stillstand wird eine ungültige COG-Anzeige angezeigt. Der Unterschied zwischen Kurs und COG hängt von Geschwindigkeit, Strömung und Wind ab. Je höher die Geschwindigkeit, desto geringer der Einfluss der Abdrift – langsame Schiffe zeigen größere Unterschiede.
Konfigurieren Sie Ihr Multifunction Display (MFD) so, dass es "Kurs" in der Databar, Databox oder der Datenanwendung anzeigt. Wenn der Wert "---" ist, fehlt eine Kursdatenquelle, z.B. ein Autopilot.
Viele nehmen fälschlicherweise an, dass Course-Up die richtige Einstellung ist, um die Bewegungsrichtung des Schiffes anzuzeigen. Head-Up wird am häufigsten bei der Pilotennavigation verwendet, um Objekte relativ zum Kurs anzuzeigen. Course-Up wird bei Navigationsfunktionen wie Go To Waypoint oder Follow Route verwendet. Bei Course-Up wird die Karte an der Navigationskurslinie ausgerichtet, was nicht immer COG oder dem Kurs entspricht.
Für ein korrektes Schiffssymbol im Stillstand und für Funktionen wie MARPA, Radarüberlagerung und Kursvektoren werden Kursdaten mit mindestens 10 Hz empfohlen. Dies ist wichtig für:
Wenn der Kurs falsch ist oder das Schiffssymbol krabbelt, kalibrieren Sie den Kursgeber für die Abweichung und stellen Sie den Kompass ein. Stellen Sie sicher, dass sich keine magnetischen Störungen innerhalb von 1 Meter befinden. Gängige Kursquellen sind Autopilot, ST60+ Instrumentenkompass, Pathfinder Smart Heading System und NMEA-Kompassse.
Fluxgate-Kompass für SPX und Smart Pilots:

EV-1/EV-2 Kursgeber für Evolution-Piloten:

Tipp: Für beste Navigationsleistung – schließen Sie einen korrekt kalibrierten Kursgeber an und überprüfen Sie regelmäßig auf Abweichungen.