
 Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Español
Español
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 Polskie
Polskie
 Norsk
Norsk
Panier
Votre panier est vide, mais il n'a pas à l'être...
Remise: 0.00 EUR
Digital Skipper |2/09, 2024
Le cap est l'angle qui indique l'orientation du navire par rapport au nord vrai ou magnétique – en bref, la direction vers laquelle le navire pointe. Cela suppose que le capteur de cap magnétique est correctement calibré et ajusté.
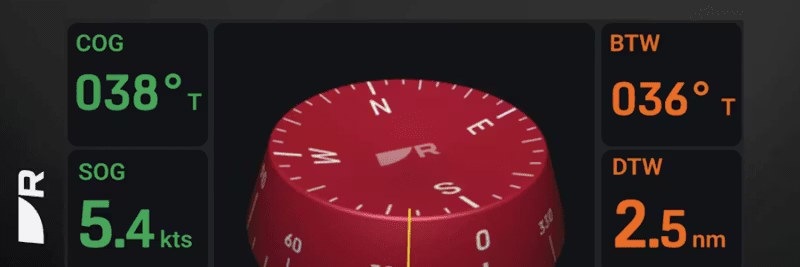
Le cap sur le fond (COG) est l'angle qui indique la direction réelle dans laquelle le navire se déplace sur la surface de la Terre par rapport au nord. Pour que le COG soit valide, le navire doit être en mouvement. À l'arrêt, une lecture COG invalide est affichée. La différence entre le cap et le COG dépend de la vitesse, du courant et du vent. Plus la vitesse est élevée, moins l'influence de la dérive est importante – les navires lents montrent des différences plus importantes.
Configurez votre écran multifonction (MFD) pour afficher "Cap" dans la barre de données, la boîte de données ou l'application de données. Si la valeur est "---", une source de données de cap est manquante, par exemple un pilote automatique.
Beaucoup supposent à tort que le Course-Up est correct pour afficher la direction de mouvement du navire. Le Head-Up est le plus souvent utilisé en navigation pilote pour afficher des objets par rapport au cap. Le Course-Up est utilisé pour les fonctions de navigation telles que Go To Waypoint ou Follow Route. En Course-Up, la carte est orientée vers la ligne de cap de navigation, ce qui ne correspond pas toujours au COG ou au cap.
Pour une icône de navire correcte à l'arrêt et pour des fonctions telles que le MARPA, la superposition radar et les vecteurs de cap, des données de cap d'au moins 10 Hz sont recommandées. C'est important pour :
Si le cap est incorrect ou si l'icône du navire semble dériver, calibrez le capteur de cap pour la déviation et ajustez la boussole. Vérifiez qu'il n'y a pas d'interférences magnétiques à moins de 1 mètre. Les sources de cap courantes sont le pilote automatique, la boussole d'instrument ST60+, le système de cap intelligent Pathfinder et les boussoles NMEA.
Compas fluxgate pour SPX et Smart Pilots :

Capteur de cap EV-1/EV-2 pour les pilotes Evolution :

Conseil : Pour des performances de navigation optimales – connectez un capteur de cap correctement calibré et vérifiez régulièrement les déviations.