
 Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Español
Español
 Deutsch
Deutsch
 Français
Français
 Italiano
Italiano
 Nederlands
Nederlands
 Norsk
Norsk
Koszyk
Twój koszyk jest pusty, ale nie musi taki być..
Rabat: 0.00 PLN
Digital Skipper |2/09, 2024
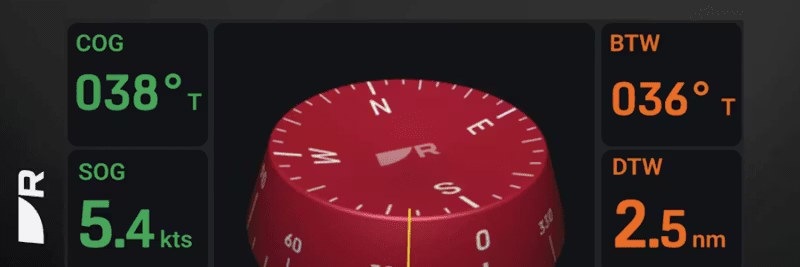
Kurs to kąt wskazujący orientację statku względem prawdziwej lub magnetycznej północy – krótko mówiąc, kierunek, w którym statek jest skierowany. Zakłada to, że magnetyczny czujnik kursu jest prawidłowo skalibrowany i wyregulowany.
Kurs nad dnem (COG) to kąt wskazujący rzeczywisty kierunek, w którym statek porusza się po powierzchni ziemi względem północy. Aby COG był ważny, statek musi być w ruchu. W przypadku postoju wyświetlany jest nieprawidłowy odczyt COG. Różnica między kursem a COG zależy od prędkości, prądu i wiatru. Im wyższa prędkość, tym mniejszy wpływ dryfu – wolne statki wykazują większe różnice.
Skonfiguruj swój wyświetlacz wielofunkcyjny (MFD) tak, aby wyświetlał „Kurs” w pasku danych, polu danych lub aplikacji danych. Jeśli wartość to „---”, brakuje źródła danych kursu, np. autopilota.
Wielu błędnie zakłada, że Course-Up jest prawidłowe do wyświetlania kierunku ruchu statku. Head-Up jest najczęściej używane w nawigacji pilotowej do wyświetlania obiektów względem kursu. Course-Up jest używane w funkcjach nawigacyjnych, takich jak Go To Waypoint lub Follow Route. W przypadku Course-Up mapa jest zorientowana względem linii kursu nawigacyjnego, co nie zawsze odpowiada COG lub kursowi.
Dla prawidłowej ikony statku w przypadku postoju oraz dla funkcji takich jak MARPA, nakładka radarowa i wektory kursu zaleca się dane kursu z częstotliwością co najmniej 10 Hz. Jest to ważne dla:
Jeśli kurs jest nieprawidłowy lub ikona statku wydaje się „krabować”, skalibruj czujnik kursu pod kątem dewiacji i wyreguluj kompas. Sprawdź, czy w promieniu 1 metra nie ma zakłóceń magnetycznych. Typowe źródła kursu to autopilot, kompas instrumentu ST60+, Pathfinder Smart Heading System i kompasy NMEA.
Kompas fluxgate dla SPX i Smart Pilots:

Czujnik kursu EV-1/EV-2 dla autopilotów Evolution:

Wskazówka: Aby uzyskać najlepszą wydajność nawigacji – podłącz prawidłowo skalibrowany czujnik kursu i regularnie sprawdzaj odchylenia.