
 Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Español
Español
 Deutsch
Deutsch
 Français
Français
 Nederlands
Nederlands
 Polskie
Polskie
 Norsk
Norsk
Carrello
Il tuo carrello è vuoto, ma non deve esserlo...
Sconto: 0.00 EUR
Digital Skipper |2/09, 2024
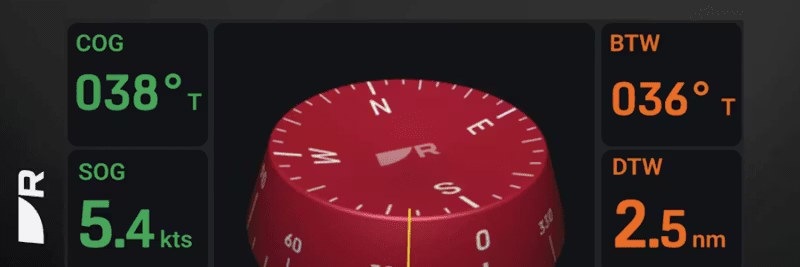
La rotta è l'angolo che indica l'orientamento della nave rispetto al nord vero o magnetico – in breve, la direzione verso cui la nave è puntata. Ciò presuppone che il sensore di rotta magnetico sia correttamente calibrato e regolato.
La rotta sul fondo (COG) è l'angolo che indica la direzione effettiva in cui la nave si muove sulla superficie terrestre rispetto al nord. Affinché il COG sia valido, la nave deve essere in movimento. Quando è ferma, viene visualizzata una lettura COG non valida. La differenza tra rotta e COG dipende dalla velocità, dalla corrente e dal vento. Maggiore è la velocità, minore è l'influenza della deriva – le navi lente mostrano differenze maggiori.
Configura il tuo Multifunction Display (MFD) per visualizzare "Rotta" nella Databar, Databox o nell'applicazione Dati. Se il valore è "---", manca una fonte di dati di rotta, ad esempio l'autopilota.
Molti presumono erroneamente che Course-Up sia corretto per mostrare la direzione di movimento della nave. Head-Up è più spesso utilizzato nella navigazione pilota per mostrare oggetti rispetto alla rotta. Course-Up è utilizzato nelle funzioni di navigazione come Go To Waypoint o Follow Route. Con Course-Up, la mappa è orientata verso la linea di rotta di navigazione, che non sempre corrisponde al COG o alla rotta.
Per un'icona della nave corretta quando è ferma e per funzioni come MARPA, sovrapposizione radar e vettori di rotta, si consigliano dati di rotta con almeno 10 Hz. Questo è importante per:
Se la rotta è errata o l'icona della nave sembra "crab", calibra il sensore di rotta per la deviazione e regola la bussola. Controlla che non ci siano interferenze magnetiche entro 1 metro. Le fonti di rotta comuni sono l'autopilota, la bussola strumentale ST60+, il Pathfinder Smart Heading System e le bussole NMEA.
Bussola fluxgate per SPX e Smart Pilots:

Sensore di rotta EV-1/EV-2 per piloti Evolution:

Suggerimento: per le migliori prestazioni di navigazione – collega un sensore di rotta correttamente calibrato e controlla regolarmente le deviazioni.