
 Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Español
Español
 Deutsch
Deutsch
 Français
Français
 Italiano
Italiano
 Polskie
Polskie
 Norsk
Norsk
Winkelwagen
Je winkelwagen is leeg, maar dat hoeft niet zo te zijn..
Korting: 0.00 EUR
Digital Skipper |2/09, 2024
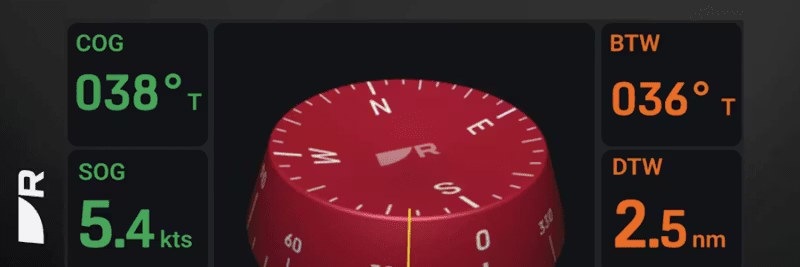
Koers is de hoek die de oriëntatie van het vaartuig aangeeft ten opzichte van het ware of magnetische noorden – kortom, de richting waarin het vaartuig wijst. Dit veronderstelt dat de magnetische koerssensor correct is gekalibreerd en afgesteld.
Koers over Grond (COG) is de hoek die de feitelijke richting aangeeft waarin het vaartuig zich over het aardoppervlak beweegt ten opzichte van het noorden. Om COG geldig te laten zijn, moet het vaartuig in beweging zijn. Bij stilstand wordt een ongeldige COG-meting weergegeven. Het verschil tussen koers en COG hangt af van snelheid, stroom en wind. Hoe hoger de snelheid, hoe minder invloed van drift – langzame vaartuigen vertonen grotere verschillen.
Configureer uw Multifunction Display (MFD) om "Koers" weer te geven in de Databar, Databox of Data-applicatie. Als de waarde "---" is, ontbreekt een koersgegevensbron, bijv. stuurautomaat.
Velen nemen ten onrechte aan dat Course-Up correct is om de bewegingsrichting van het vaartuig weer te geven. Head-Up wordt meestal gebruikt bij pilootnavigatie om objecten relatief ten opzichte van de koers weer te geven. Course-Up wordt gebruikt bij navigatiefuncties zoals Go To Waypoint of Follow Route. Bij Course-Up wordt de kaart georiënteerd naar de navigatiekoerslijn, wat niet altijd overeenkomt met COG of koers.
Voor een correct vaartuigicoon bij stilstand en voor functies zoals MARPA, radaroverlay en koersvectoren worden koersgegevens met minimaal 10 Hz aanbevolen. Dit is belangrijk voor:
Als de koers onjuist is of het vaartuigicoon lijkt te krabben, kalibreer dan de koerssensor voor afwijking en stel het kompas af. Controleer of er geen magnetische storingen binnen 1 meter zijn. Gangbare koersbronnen zijn stuurautomaat, ST60+ instrumentenkompas, Pathfinder Smart Heading System en NMEA-kompassen.
Fluxgate-kompas voor SPX en Smart Pilots:

EV-1/EV-2 koerssensor voor Evolution-piloten:

Tip: Voor de beste navigatieprestaties – sluit een correct gekalibreerde koerssensor aan en controleer regelmatig op afwijkingen.