Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Español
Español
 Deutsch
Deutsch
 Français
Français
 Nederlands
Nederlands
 Polskie
Polskie
 Norsk
Norsk
Carrello
Il tuo carrello è vuoto, ma non deve esserlo...
Sconto: 0.00 DKK
Digital Skipper |1/05, 2024
Questa FAQ fa parte della nostra nuova serie per la risoluzione dei problemi dei sistemi SONAR. Qui troverai guide dettagliate per esaminare e risolvere i problemi comuni con il SONAR, incluse interferenze e impostazioni. Indipendentemente dal fatto che tu utilizzi un sistema SONAR RV, RVM o AIRMAR CHIRP, offriamo istruzioni passo-passo per garantire prestazioni ottimali. Hai bisogno di aiuto con l'installazione o il test? Allora questo è il posto giusto.
PARTE 1 – ERRORE SONAR: Nessun trasduttore collegato
PARTE 2 – Introduzione alle interferenze SONAR
PARTE 3 – Indagine sulle interferenze SONAR – Impostazione manuale
PARTE 4 – Impostazione e test SONAR: Quando il SONAR non è influenzato da interferenze
PARTE 5 – Impostazione e test SONAR: Quando il SONAR è influenzato da interferenze
PARTE 6 – Test del resistore di rilevamento del trasduttore RV e RVM
A parte rari casi in cui il SONAR non funziona come previsto, ad esempio nel recupero del blocco del fondo (spesso correlato al software), il nostro hardware e l'elaborazione del segnale funzionano molto bene e forniscono ritorni chiari.

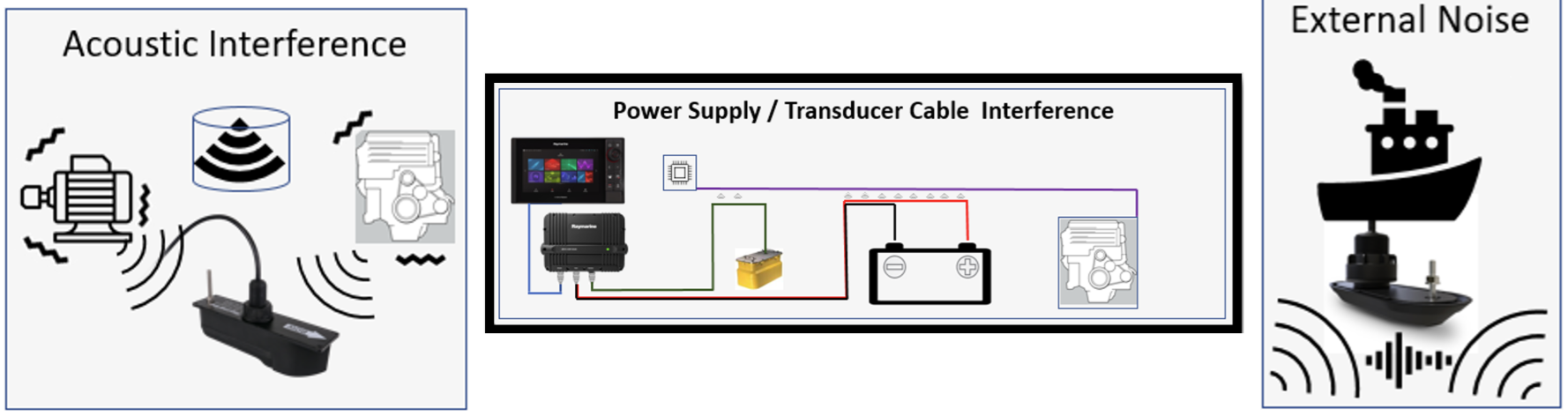
Eventuali problemi di prestazioni con il SONAR sono solitamente dovuti a fattori esterni, non all'ecoscandaglio o al trasduttore. Le cause comuni sono:
Non importa quanto sia buono il segnale di fondo – è il rapporto segnale/rumore che determina. Di seguito è riportato un esempio in cui un elevato ritorno del segnale è mascherato da un rumore elevato in modalità automatica, il che si traduce in un'immagine di fondo debole e nessun bersaglio di pesce.
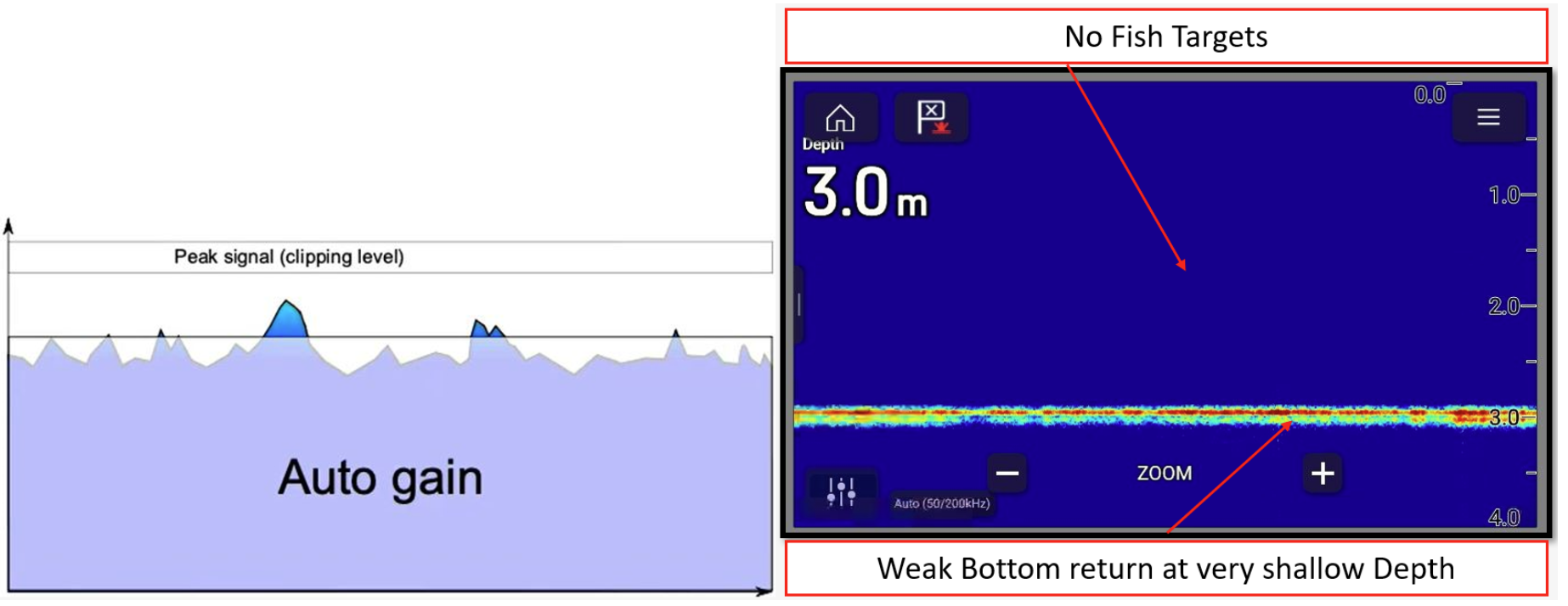
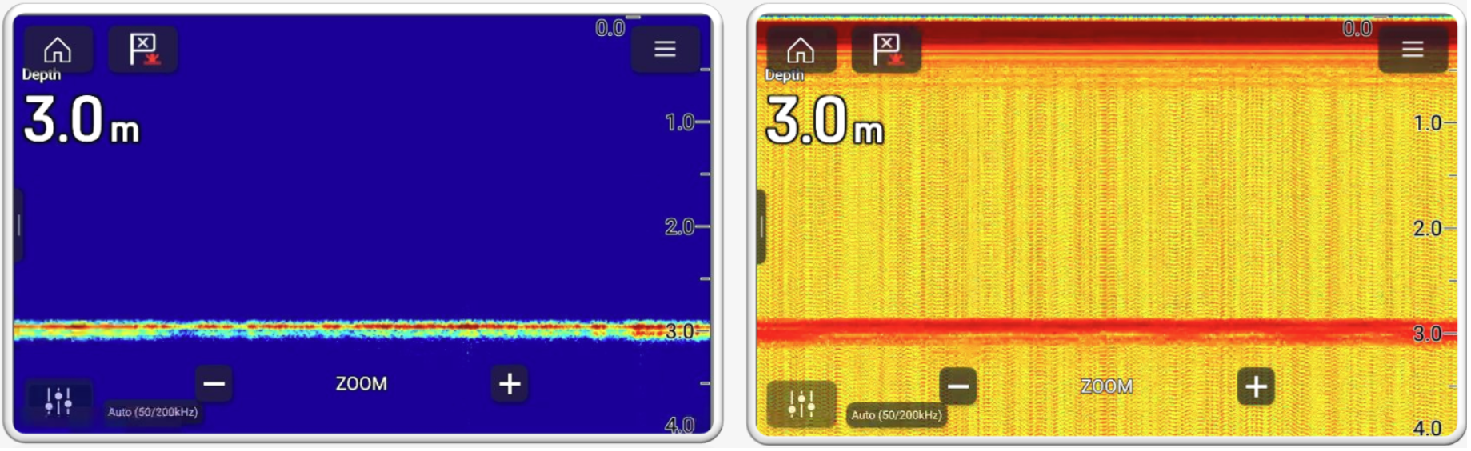
La sensibilità automatica funziona bene nella maggior parte dei casi, ma può nascondere le interferenze. Confronta le immagini seguenti: a sinistra mostra la modalità AUTO senza rumore, a destra mostra la modalità manuale in cui è visibile il rumore di fondo.
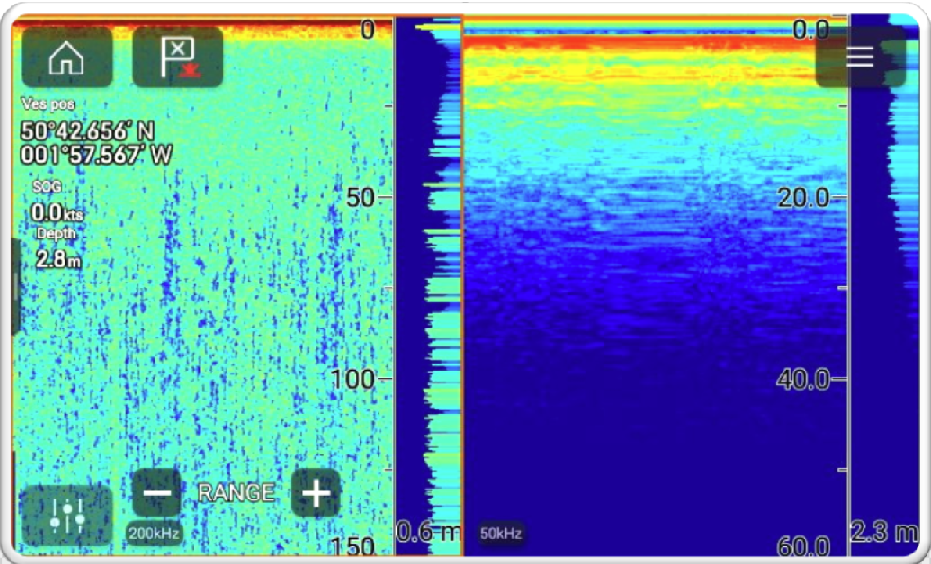
Impostando manualmente la portata è possibile identificare le interferenze. Se la profondità è di 10 m, non dovresti vedere ritorni a 100 m – tutto ciò che viene visualizzato lì è interferenza. Esempio: su un sistema CP370, la profondità era di 2,8 m ma lo schermo mostrava interferenze fino a 150 m a 200 kHz.