
 Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Español
Español
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 Polskie
Polskie
 Norsk
Norsk
Panier
Votre panier est vide, mais il n'a pas à l'être...
Remise: 0.00 DKK
Digital Skipper |29/02, 2024
Les problèmes de direction de l'autopilote sont souvent dus à un phasage incorrect du moteur d'entraînement ou du capteur de référence de gouvernail. Ceux-ci sont normalement vérifiés et corrigés via le Dockside Wizard (autopilotes Evolution) ou le Dockside Calibration (modèles plus anciens).
La correction peut être effectuée via la tête de commande de l'autopilote (par exemple, p70s) ou en modifiant les connexions sur les bornes du moteur et du gouvernail de l'ACU/ordinateur de cap de l'autopilote.
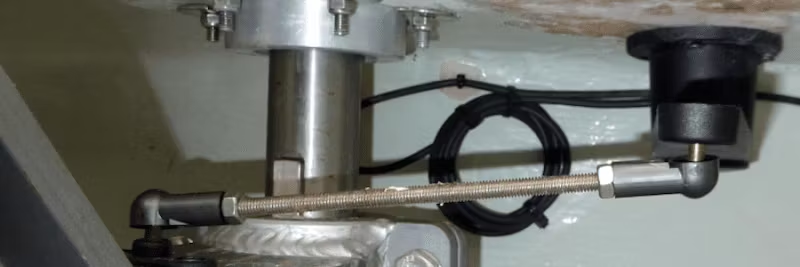
Si le navire est équipé d'un capteur de référence de gouvernail, il doit être testé avant le phasage du moteur. Bien que le capteur soit facultatif pour certains autopilotes, il offre des performances maximales lorsqu'il est connecté.
NOTE : Les tests suivants doivent être effectués lorsque le navire est à quai, ancré ou amarré.
Pendant le Dockside Wizard/Calibration : Si le volant est tourné dans le sens des aiguilles d'une montre mais que l'affichage de l'autopilote indique un gouvernail à gauche, le phasage est incorrect.
Solution via p70s : MENU → SET-UP → AUTOPILOT CALIBRATION → DRIVE SETTINGS → REVERSE RUDDER REF
Alternative (meilleure pratique) :

Si l'autopilote est commandé en AUTO et qu'un changement de cap de +10° est effectué, le volant et le gouvernail doivent se déplacer vers la droite. S'ils se déplacent vers la gauche, le phasage du moteur est incorrect.
Solution via p70s : MENU → SET-UP → AUTOPILOT CALIBRATION → DRIVE SETTINGS → MOTOR PHASING
Alternative :

Une Pilot Factory Reset (MENU → SET-UP → AUTOPILOT CALIBRATION → COMMISSIONING → PILOT FACTORY RESET) restaure le MOTOR PHASING et le RUDDER REFERENCE aux valeurs par défaut. Si vous avez modifié ces paramètres via la tête de commande, vous devrez les reconfigurer ou refaire les modifications physiques des câbles.