Svenska
Svenska
 Dansk
Dansk
 English
English
 Español
Español
 Deutsch
Deutsch
 Français
Français
 Italiano
Italiano
 Nederlands
Nederlands
 Polskie
Polskie
 Norsk
Norsk
Ostoskori
Ostoskorisi on tyhjä, mutta sen ei tarvitse olla..
Discount: 0.00 PLN
Digital Skipper |1/05, 2024
Tämä UKK on osa uutta SONAR-järjestelmien vianmäärityssarjaamme. Täältä löydät yksityiskohtaiset oppaat SONARin yleisten ongelmien, kuten häiriöiden ja asetusten, tutkimiseen ja ratkaisemiseen. Käytitpä sitten RV-, RVM- tai AIRMAR CHIRP SONAR-järjestelmää, tarjoamme vaiheittaiset ohjeet optimaalisen suorituskyvyn varmistamiseksi. Tarvitsetko apua asennuksessa tai testauksessa? Silloin tämä on oikea paikka.
OSA 1 – SONAR-VIKA: Anturia ei ole kytketty
OSA 2 – Johdanto SONAR-häiriöihin
OSA 3 – SONAR-häiriöiden tutkiminen – Manuaalinen asetus
OSA 4 – SONAR-asetukset ja -testaus: Kun SONAR ei kärsi häiriöistä
OSA 5 – SONAR-asetukset ja -testaus: Kun SONAR kärsii häiriöistä
OSA 6 – RV ja RVM Transducer Sense Resistor Test
Lukuun ottamatta yksittäisiä tapauksia, joissa SONAR ei toimi tarkoitetulla tavalla, esimerkiksi pohjalukon uudelleen hankinnassa (usein ohjelmistoon liittyvää), laitteistomme ja signaalinkäsittelymme toimivat erittäin hyvin ja tuottavat selkeitä palautuksia.

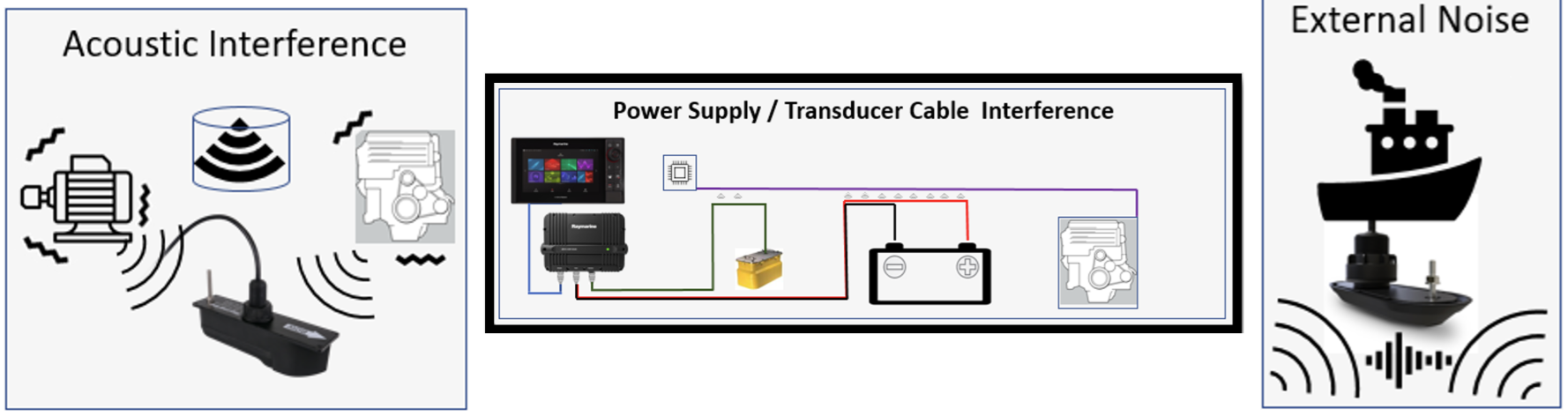
Mahdolliset SONARin suorituskykyongelmat johtuvat yleensä ulkoisista tekijöistä, eivät kaikuluotaimesta tai anturista. Yleisiä syitä ovat:
Ei ole väliä kuinka hyvä pohjasignaali on – signaali-kohinasuhde ratkaisee. Alla näet esimerkin, jossa korkea signaalipalautus peittyy korkeaan kohinaan automaattitilassa, mikä antaa heikon pohjakuvan eikä kalakohteita.
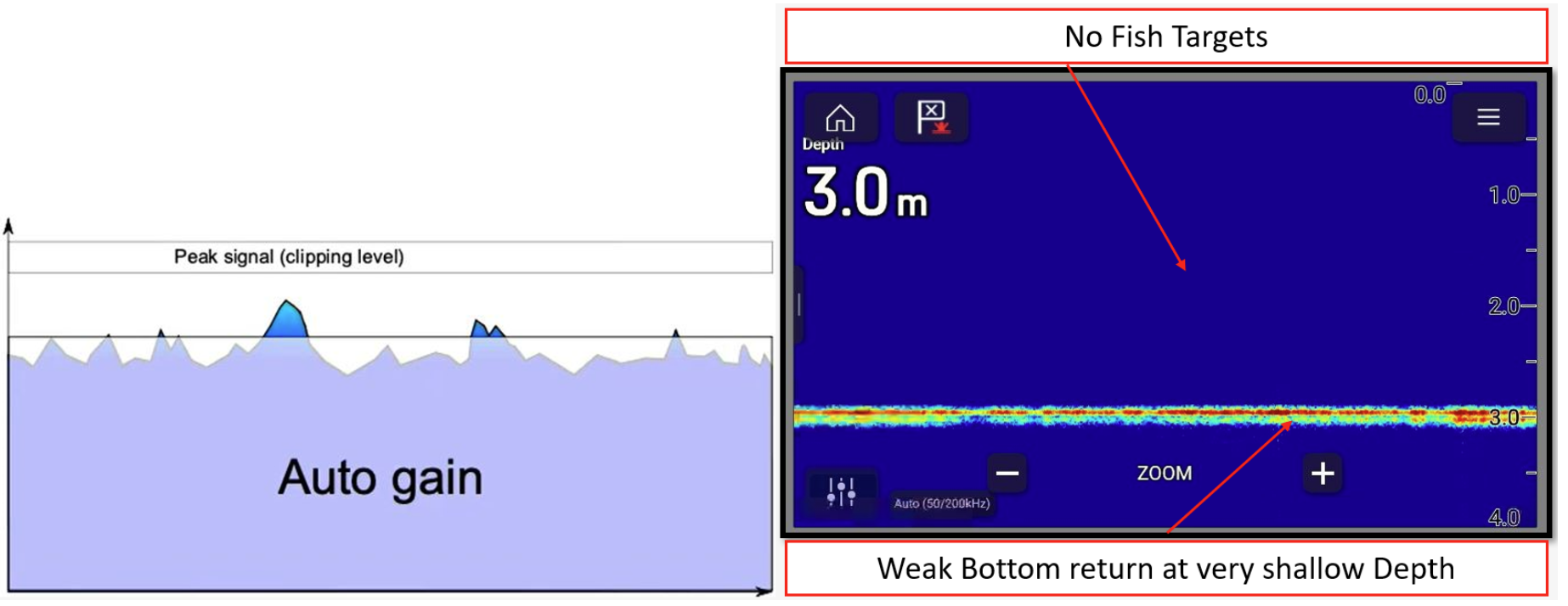
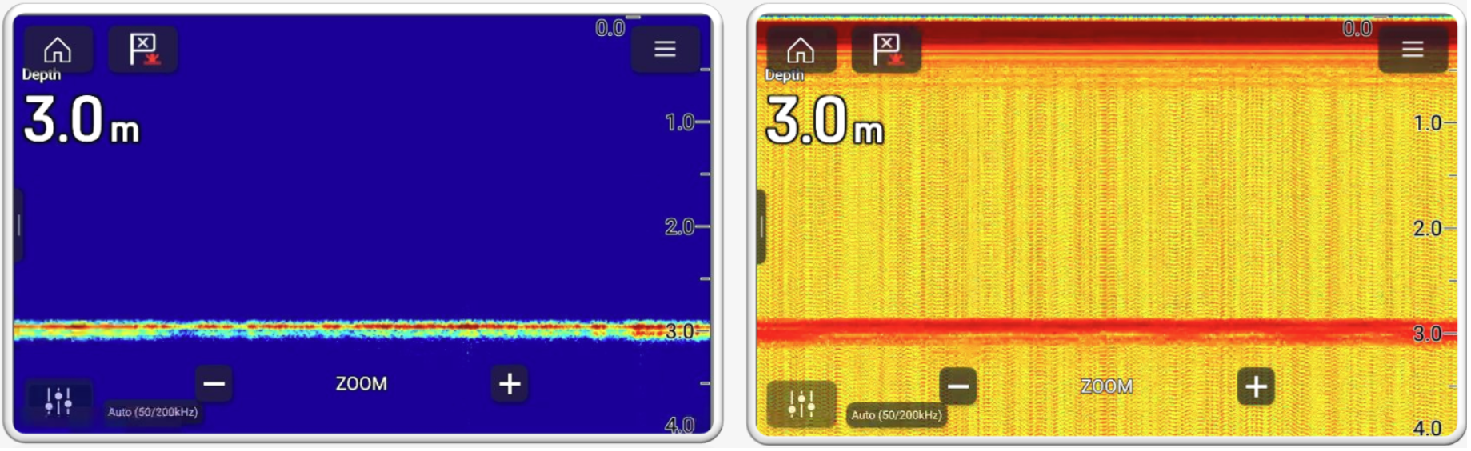
Automaattinen herkkyys toimii hyvin useimmissa tapauksissa, mutta voi peittää häiriöitä. Vertaa alla olevia kuvia: vasen näyttää AUTO-tilan ilman kohinaa, oikea näyttää manuaalisen tilan, jossa taustakohina näkyy.
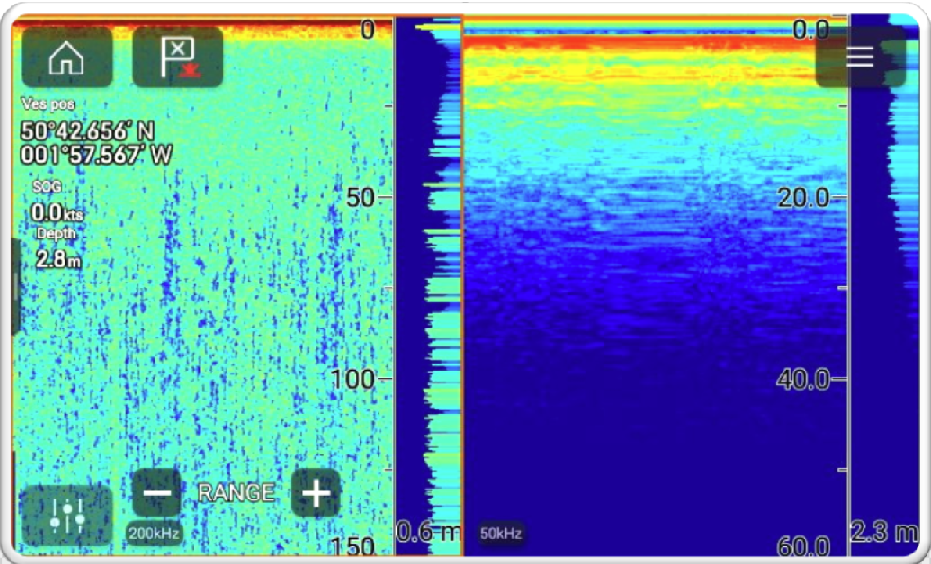
Asettamalla kantaman manuaalisesti voit tunnistaa häiriöt. Jos syvyys on 10 m, et saisi nähdä palautuksia 100 m:n kohdalla – kaikki siellä näkyvä on häiriötä. Esimerkki: CP370-järjestelmässä syvyys oli 2,8 m, mutta näyttö näytti häiriöitä 150 m:iin asti 200 kHz:llä.