
 Svenska
Svenska
 Dansk
Dansk
 English
English
 Español
Español
 Deutsch
Deutsch
 Français
Français
 Italiano
Italiano
 Nederlands
Nederlands
 Polskie
Polskie
 Norsk
Norsk
Ostoskori
Ostoskorisi on tyhjä, mutta sen ei tarvitse olla..
Discount: 0.00 SEK
Digital Skipper |29/02, 2024
Autopilotin ohjauksen ongelmat johtuvat usein käyttömoottorin tai peräsinreferenssianturin virheellisestä vaiheistuksesta. Nämä tarkistetaan ja korjataan yleensä Dockside Wizardin (Evolution-autopilotit) tai Dockside Calibrationin (vanhemmat mallit) kautta.
Korjaus voidaan tehdä autopilotin ohjauspään (esim. p70s) kautta tai muuttamalla ACU/autopilotin kurssitietokoneen moottori- ja peräsinliitäntöjen kytkentöjä.
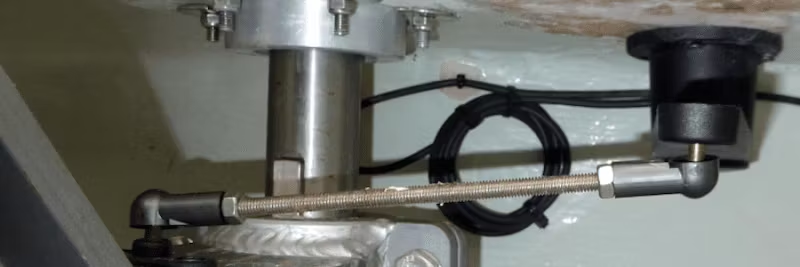
Jos aluksessa on peräsinreferenssianturi, se tulee testata ennen moottorin vaiheistusta. Vaikka anturi on valinnainen joissakin autopiloteissa, se tarjoaa maksimaalisen suorituskyvyn, kun se on kytketty.
HUOM: Seuraavat testit tulee suorittaa, kun alus on laiturissa, ankkuroitu tai kiinnitetty.
Dockside Wizard/Calibrationin aikana: Jos ruoria käännetään myötäpäivään, mutta autopilotin näyttö näyttää vasenta peräsintä, vaiheistus on virheellinen.
Ratkaisu p70s:n kautta: MENU → SET-UP → AUTOPILOT CALIBRATION → DRIVE SETTINGS → REVERSE RUDDER REF
Vaihtoehto (paras käytäntö):

Jos autopilotti käsketään AUTO-tilaan ja tehdään +10° kurssimuutos, ruorin ja peräsimen tulee liikkua oikealle. Jos ne liikkuvat vasemmalle, moottorin vaiheistus on virheellinen.
Ratkaisu p70s:n kautta: MENU → SET-UP → AUTOPILOT CALIBRATION → DRIVE SETTINGS → MOTOR PHASING
Vaihtoehto:

Pilot Factory Reset (MENU → SET-UP → AUTOPILOT CALIBRATION → COMMISSIONING → PILOT FACTORY RESET) palauttaa MOTOR PHASING- ja RUDDER REFERENCE -asetukset oletusarvoihin. Jos olet muuttanut näitä asetuksia ohjauspään kautta, sinun on määritettävä ne uudelleen tai tehtävä fyysiset kaapelimuutokset uudelleen.