
 Svenska
Svenska
 Dansk
Dansk
 English
English
 Suomi
Suomi
 Deutsch
Deutsch
 Français
Français
 Italiano
Italiano
 Nederlands
Nederlands
 Polskie
Polskie
 Norsk
Norsk
Carrito
Tu carrito está vacío, pero no tiene por qué estarlo...
Discount: 0.00 SEK
Digital Skipper |2/09, 2024
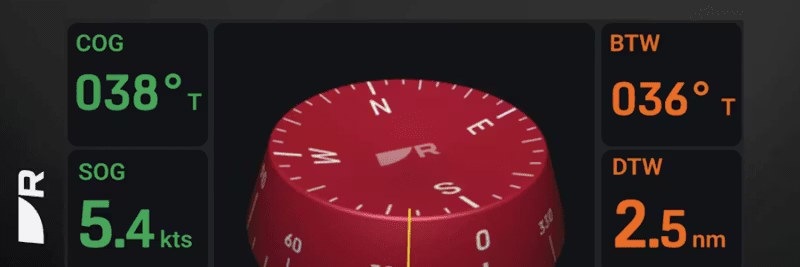
El Rumbo es el ángulo que indica la orientación de la embarcación con respecto al norte verdadero o magnético, en resumen, la dirección a la que apunta la embarcación. Esto asume que el sensor de rumbo magnético está correctamente calibrado y ajustado.
El Rumbo sobre el fondo (COG) es el ángulo que indica la dirección real en la que la embarcación se mueve sobre la superficie terrestre con respecto al norte. Para que el COG sea válido, la embarcación debe estar en movimiento. Cuando está parada, se muestra una lectura de COG no válida. La diferencia entre rumbo y COG depende de la velocidad, la corriente y el viento. Cuanto mayor sea la velocidad, menor será el impacto de la deriva; las embarcaciones lentas muestran mayores diferencias.
Configure su Pantalla Multifunción (MFD) para mostrar "Rumbo" en la Barra de Datos, el Cuadro de Datos o la aplicación de Datos. Si el valor es "---", falta una fuente de datos de rumbo, por ejemplo, el piloto automático.
Muchos asumen erróneamente que Course-Up es correcto para mostrar la dirección de movimiento de la embarcación. Head-Up se usa con mayor frecuencia en la navegación con piloto para mostrar objetos en relación con el rumbo. Course-Up se usa en funciones de navegación como Ir a Waypoint o Seguir Ruta. En Course-Up, el mapa se orienta hacia la línea de rumbo de navegación, lo que no siempre corresponde al COG o al rumbo.
Para un icono de embarcación preciso cuando está parado y para funciones como MARPA, superposición de radar y vectores de rumbo, se recomiendan datos de rumbo con al menos 10 Hz. Esto es importante para:
Si el rumbo es incorrecto o el icono de la embarcación parece "cangrejo", calibre el sensor de rumbo para la desviación y ajuste la brújula. Verifique que no haya interferencias magnéticas dentro de 1 metro. Las fuentes de rumbo comunes son el piloto automático, la brújula de instrumento ST60+, el sistema Pathfinder Smart Heading y las brújulas NMEA.
Brújula Fluxgate para SPX y Smart Pilots:

Sensor de rumbo EV-1/EV-2 para pilotos Evolution:

Consejo: Para un rendimiento de navegación óptimo, conecte un sensor de rumbo correctamente calibrado y verifique regularmente las desviaciones.