Svenska
Svenska
 English
English
 Suomi
Suomi
 Español
Español
 Deutsch
Deutsch
 Français
Français
 Italiano
Italiano
 Nederlands
Nederlands
 Polskie
Polskie
 Norsk
Norsk
Kurv
Din kurv er tom, men det behøver den ikke at være..
Discount: 0,00 DKK
Digital Skipper |1/05, 2024
Denne FAQ er en del af vores nye serie til fejlfinding af SONAR-systemer. Her finder du detaljerede vejledninger til at undersøge og løse almindelige problemer med SONAR, herunder forstyrrelser og indstillinger. Uanset om du bruger et RV-, RVM- eller AIRMAR CHIRP SONAR-system, tilbyder vi trin-for-trin-instruktioner for at sikre optimal ydeevne. Har du brug for hjælp til installation eller test? Så er dette det rette sted.
DEL 1 – SONAR FEJL: Ingen transducer tilsluttet
DEL 2 – Introduktion til SONAR-forstyrrelser
DEL 3 – SONAR-forstyrrelsesundersøgelse – Manuel indstilling
DEL 4 – SONAR Indstilling & Test: Når SONAR ikke påvirkes af forstyrrelser
DEL 5 – SONAR Indstilling & Test: Når SONAR påvirkes af forstyrrelser
DEL 6 – RV og RVM Transducer Sense Resistor Test
Udover enkelte tilfælde, hvor SONAR ikke fungerer som tilsigtet, f.eks. ved genanskaffelse af bundlås (ofte software-relateret), præsterer vores hardware og signalbehandling meget godt og giver tydelige returer.

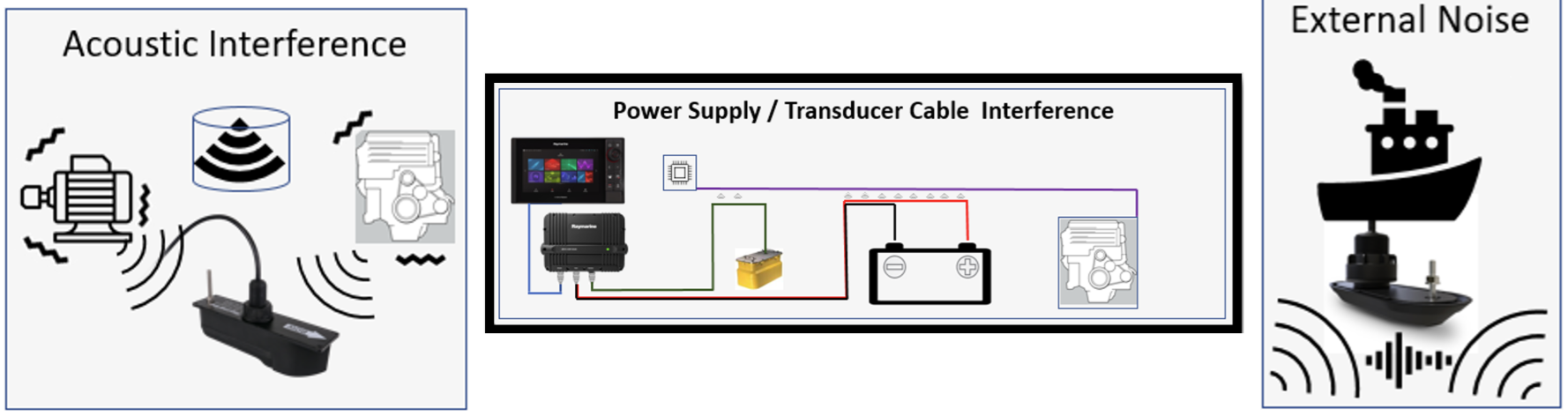
Eventuelle ydeevneproblemer med SONAR skyldes oftest eksterne faktorer, ikke ekkoloddet eller transduceren. Almindelige årsager er:
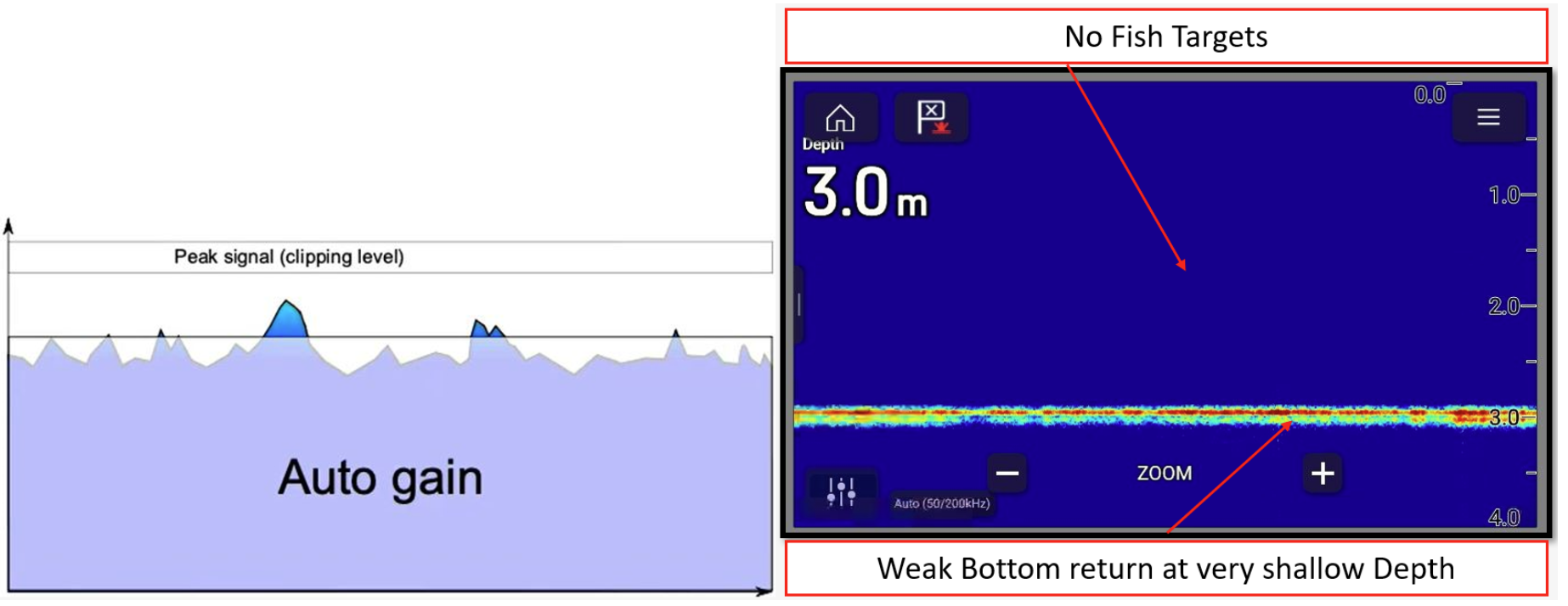
Det er ligegyldigt, hvor godt bundsignalet er – det er signal-til-støj-forholdet, der afgør. Nedenfor ser du et eksempel, hvor høj signalretur maskeres af høj støj i automatisk tilstand, hvilket giver et svagt bundbillede og ingen fiskemål.
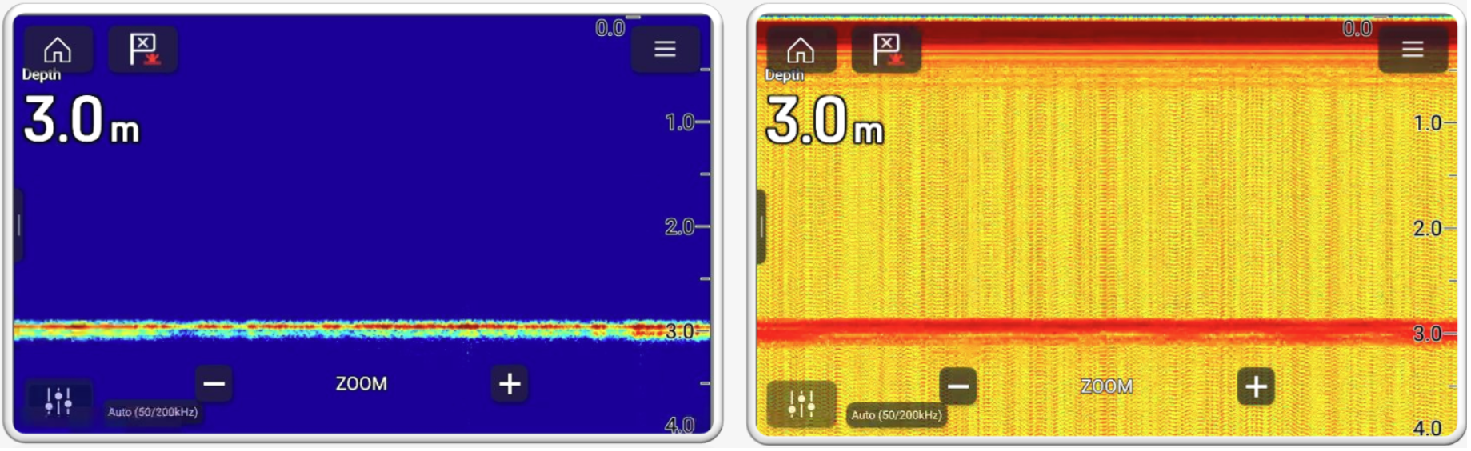
Automatisk følsomhed fungerer godt i de fleste tilfælde, men kan skjule forstyrrelser. Sammenlign billederne nedenfor: venstre viser AUTO-tilstand uden støj, højre viser manuel tilstand, hvor baggrundsstøjen er synlig.
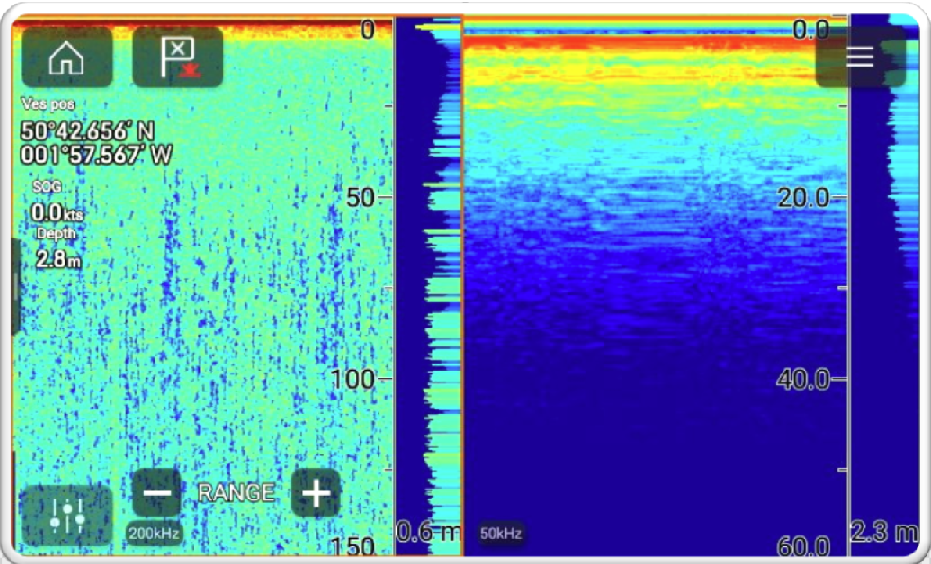
Ved at indstille rækkevidden manuelt kan du identificere forstyrrelser. Hvis dybden er 10 m, skal du ikke se returer ved 100 m – alt, hvad der vises der, er forstyrrelser. Eksempel: På et CP370-system var dybden 2,8 m, men skærmen viste forstyrrelser ned til 150 m ved 200 kHz.